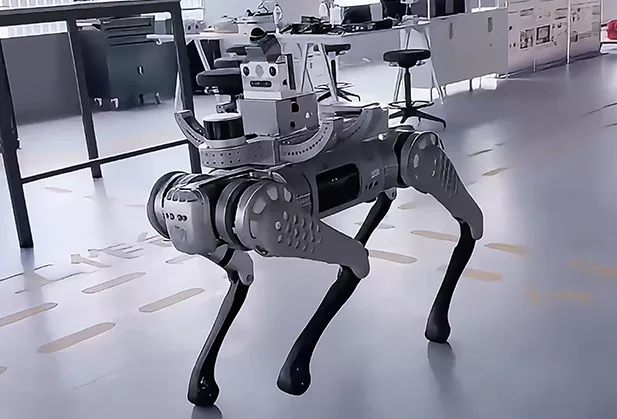
GeoScan S1最强性价比实景三维建图仪由朝闻道机器人携手同济大学刘春教授团队和西北工业大学历时八年研发。
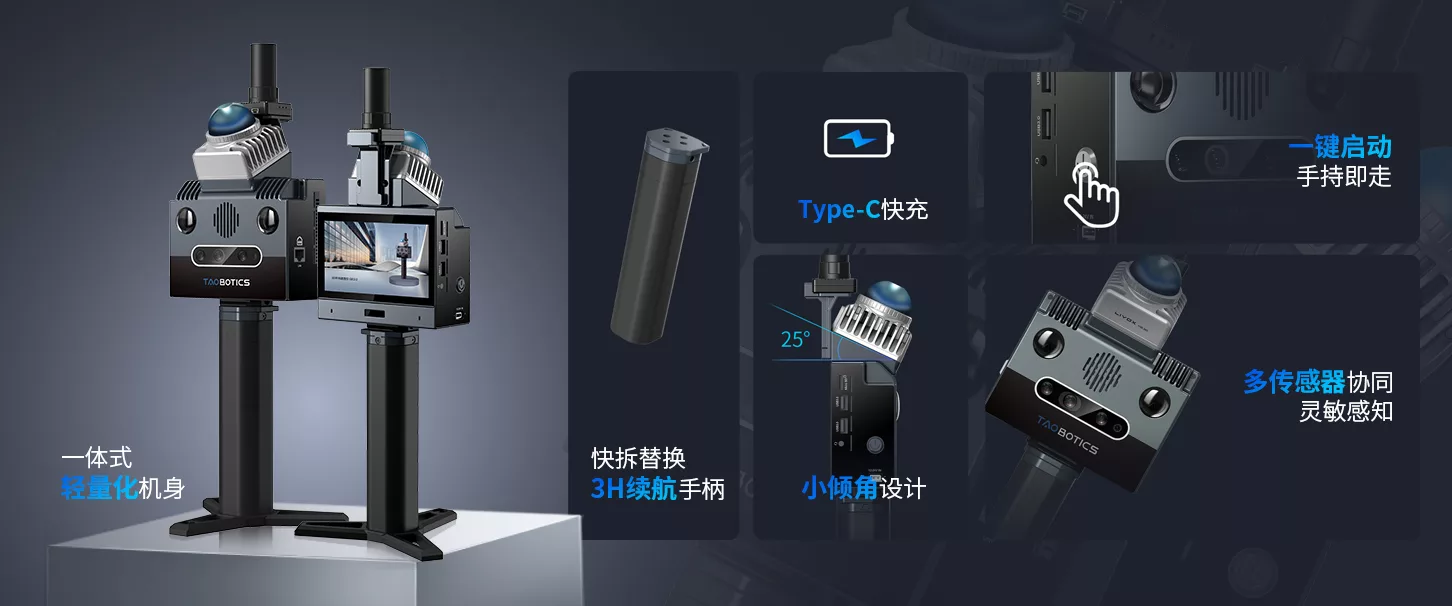
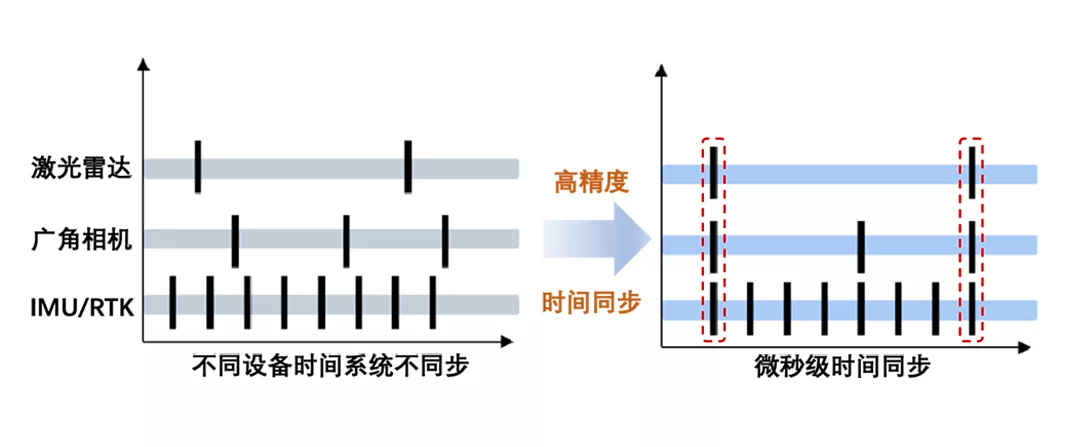
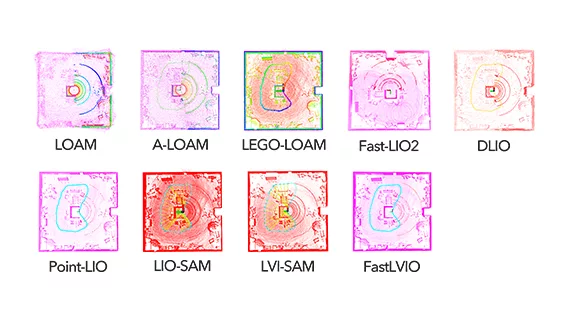
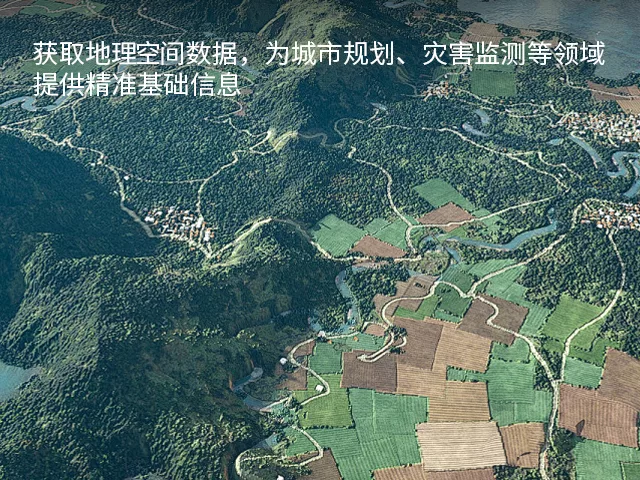
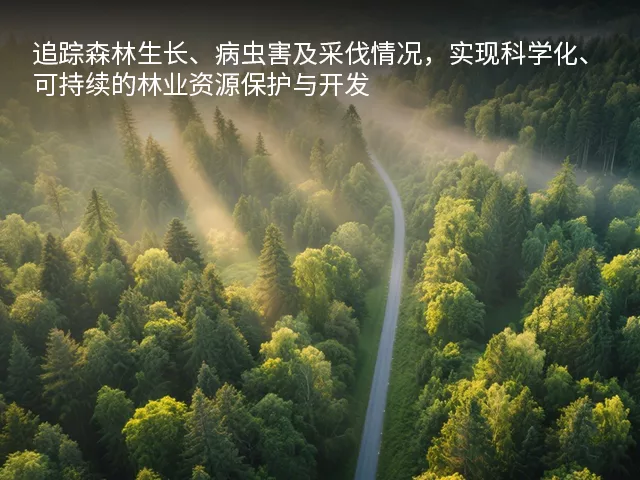
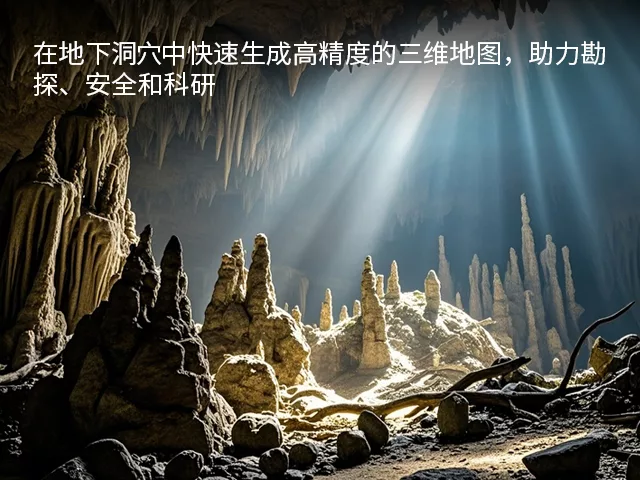
轻量化设计,一键启动,便可拥有高效实用的三维解决方案。以多模态传感器融合算法为核心,实现厘米级精度的三维场景实时重构。可广泛用于多种作业领域。
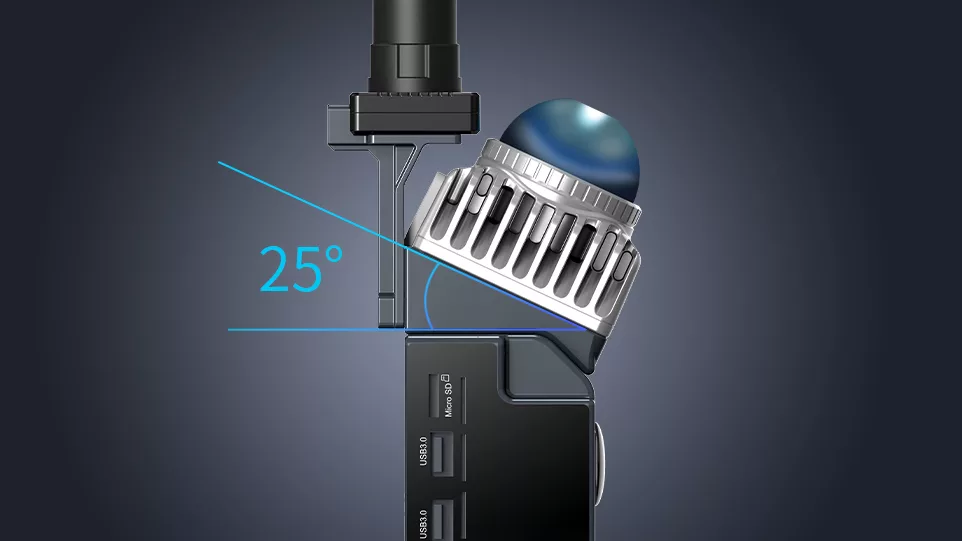
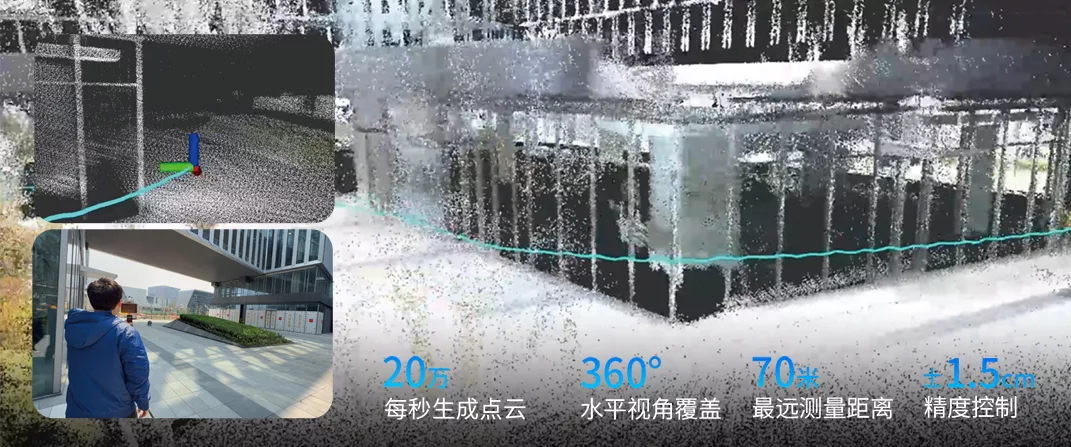
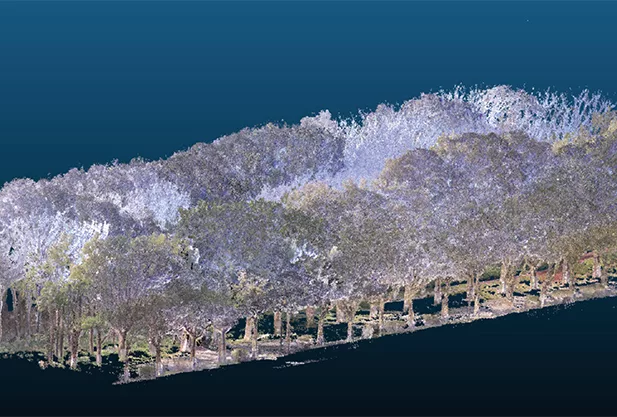
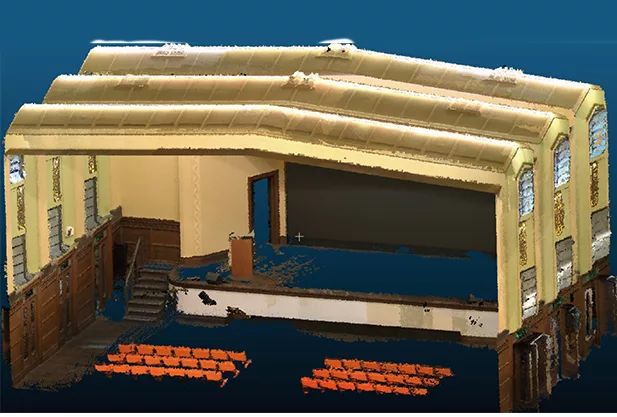
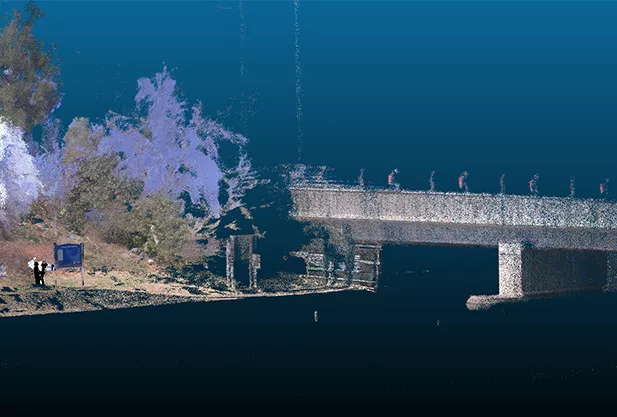
每秒十万级点云成图,70米测量距离,360°全域覆盖,支持5万平米以上的大场景,扫描可选配3D高斯数据采集模块,实现高保真实景还原。支持跨平台集成,配备高带宽网口及双USB 3.0接口,为科研实验提供灵活扩展空间。降低开发门槛,助力开发者快速掌握研发能力,开启更多可能!