自主移动全向机器人Gemini-O是以移动小车为载体,以“机器人+人工智能”为核心,集成嵌入式技术、智能感知技术、机器人技术、SLAM技术、人工智能技术及机器视觉技术于一体,用户可根据实践内容快速搭建不同的实践应用场景,快速实现包含物流机器人、巡检机器人、服务机器人、复合式AGV、集群编队、人工智能实训平台丰富的应用场景。可培养学生从“结构认知—电控设计一编程控制一应用开发”全流程的复合型人才,实现按照“点一线一面”循序渐进式地立体培养。


运动灵活
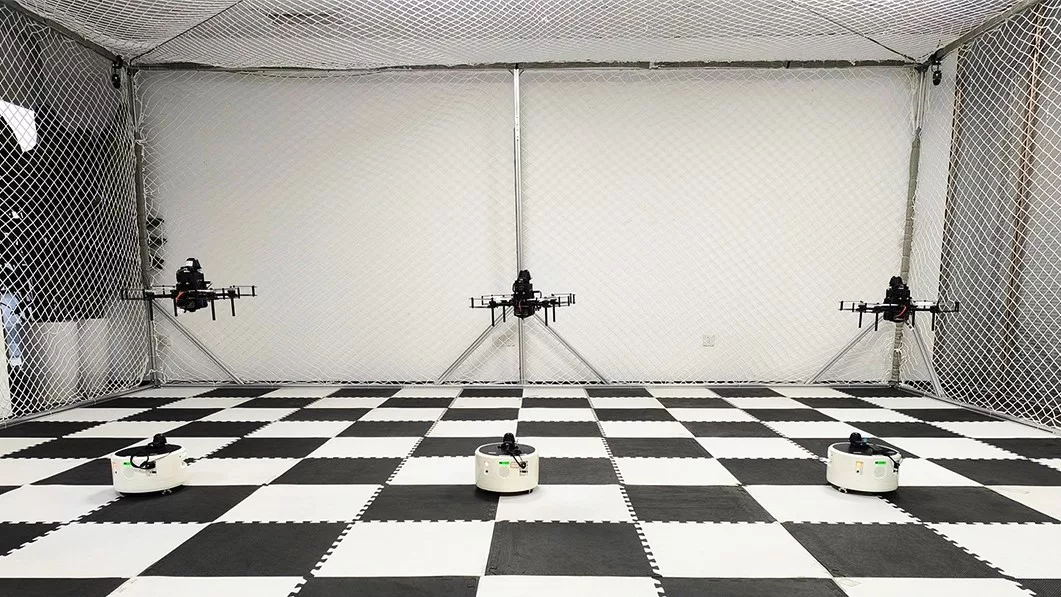
集群编队
支持机械臂
智能感知
多摄像头
激光雷达定位
丰富接口
代码开源
C++
Python
ROS
使用教程








机器臂套件
复合机器人可扩展安装桌面六轴机械臂,工作半径280mm,末端负载250g,可装配机械爪。

远程驾驶套件
复合机器人可扩展远程驾驶套件,通过4G/5G网络在危险环境中远程控制,利用深度学习处理图像数据,发现潜在问题,保障安全并有效处理任务。



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

