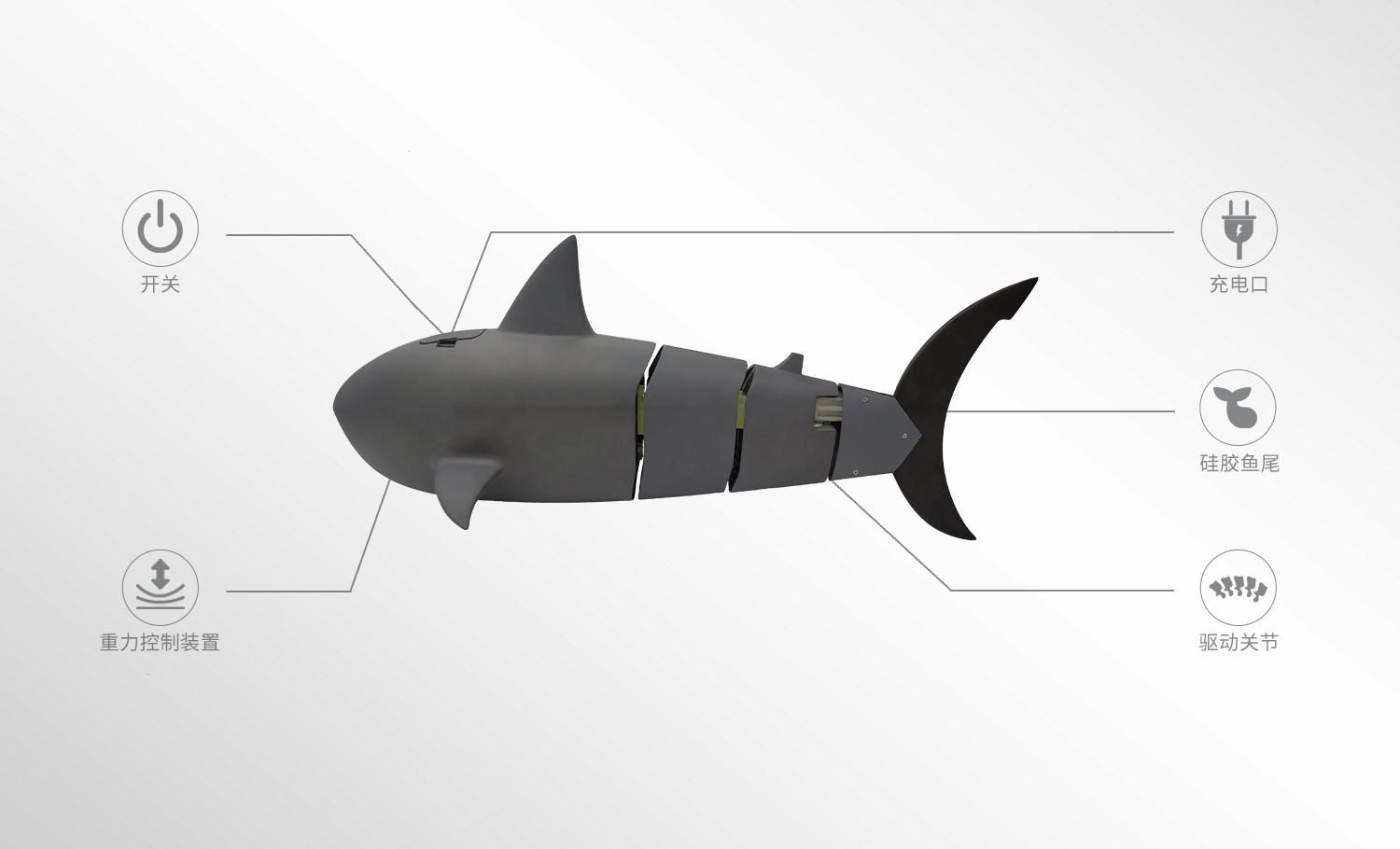
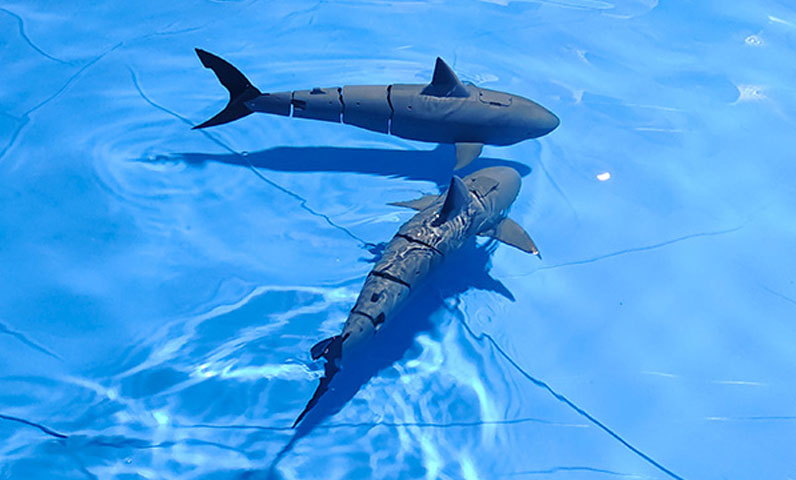
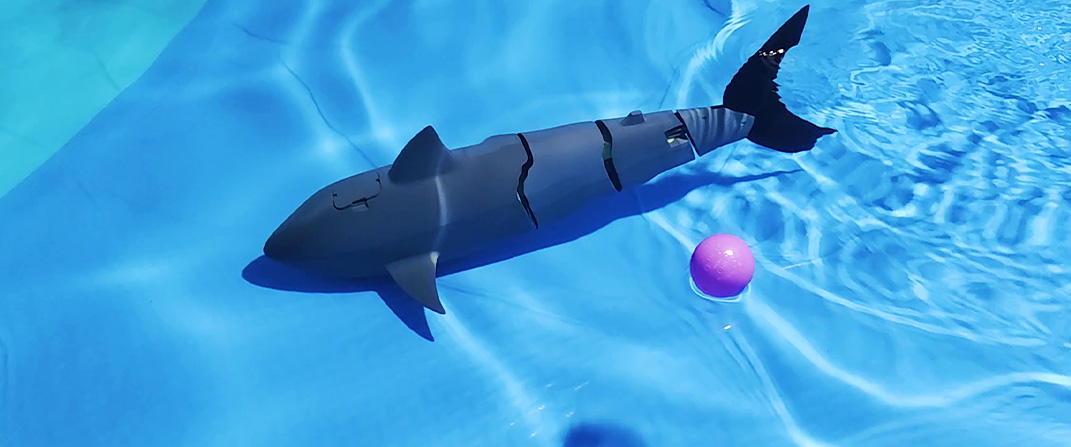
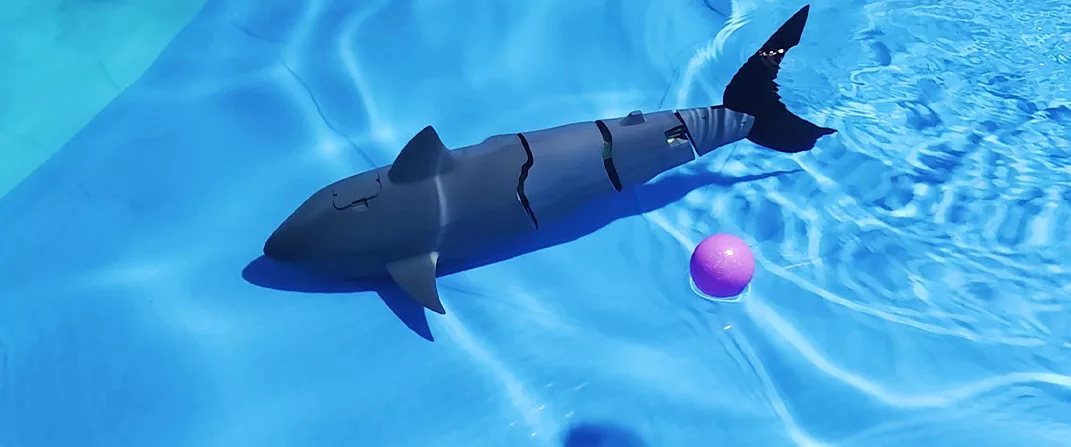
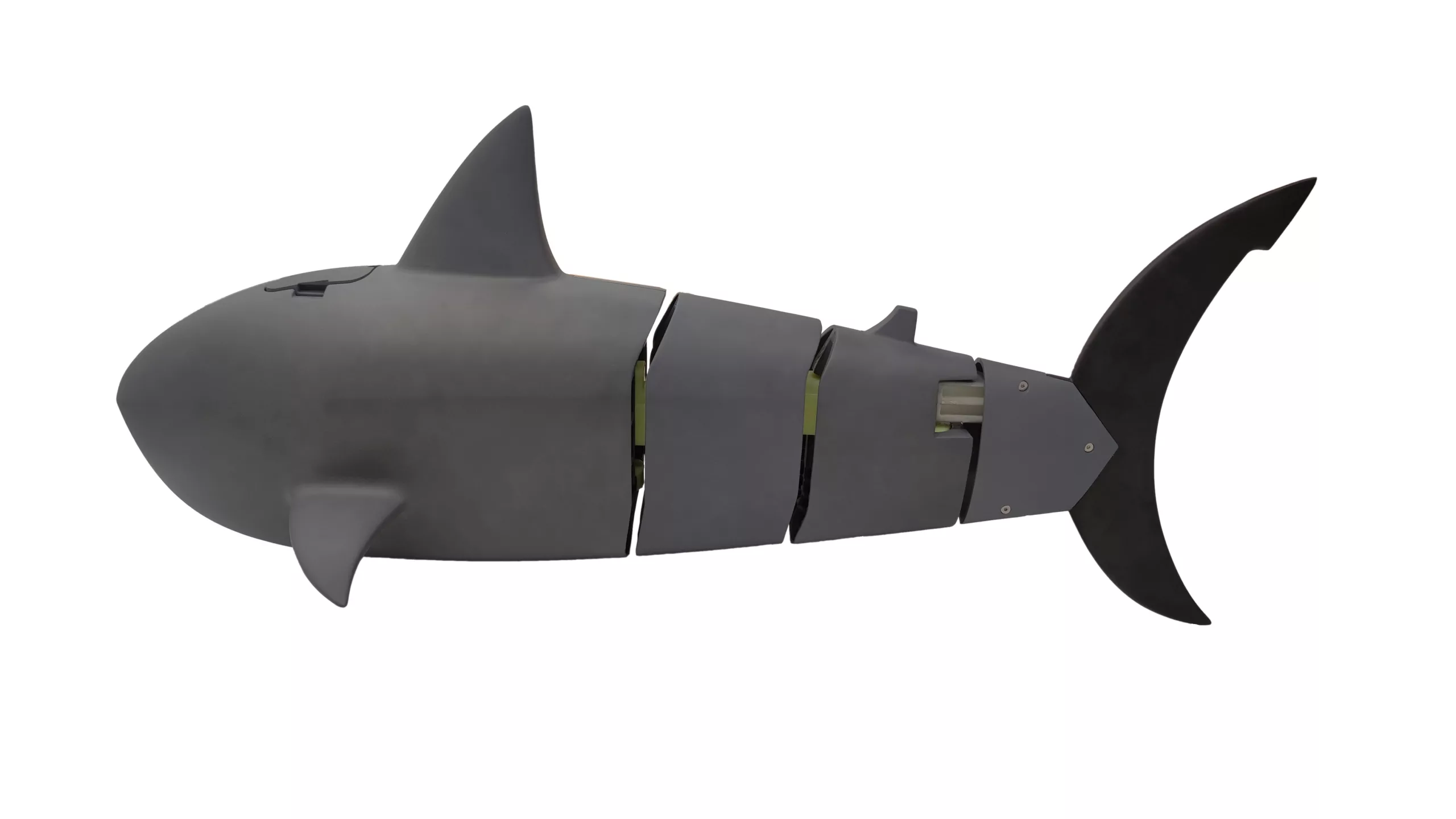
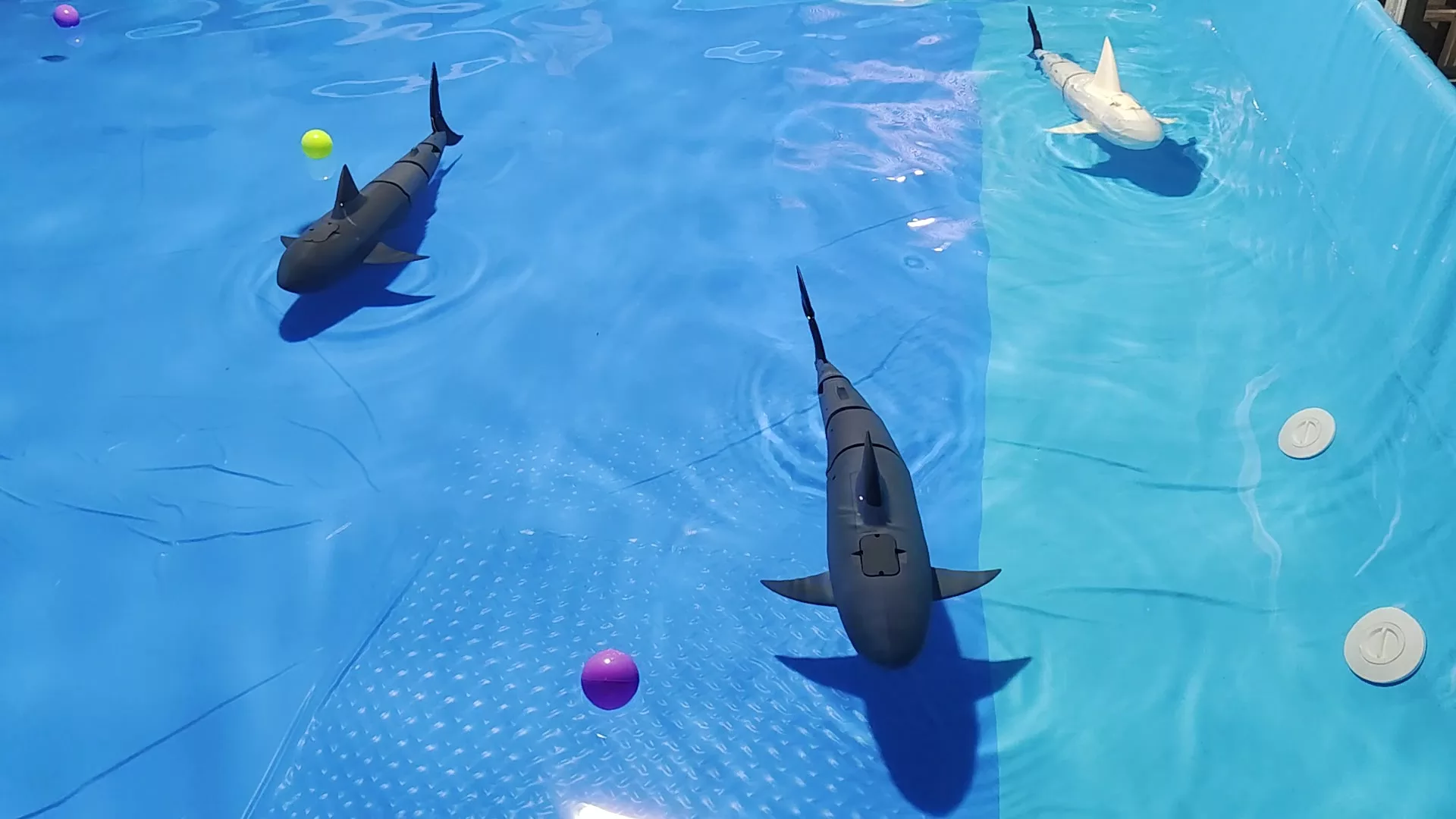
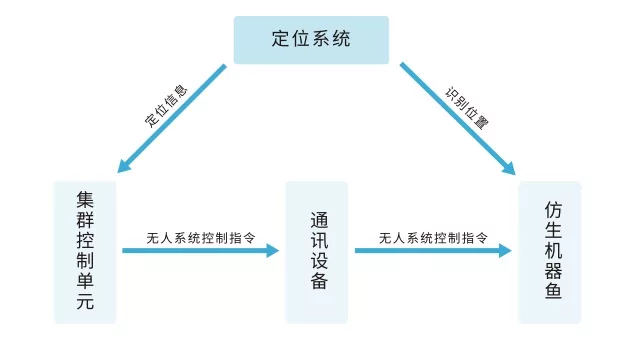
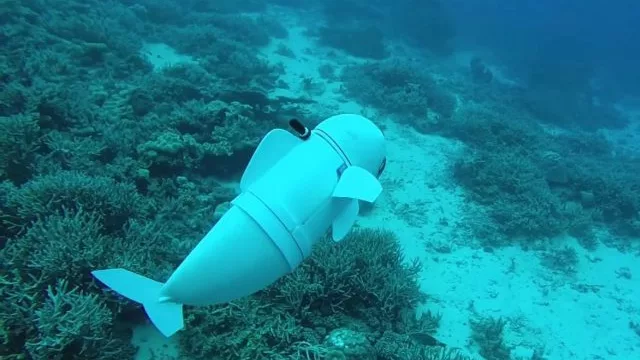
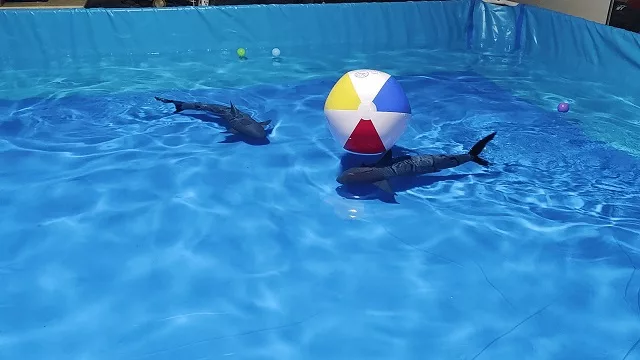
Shark680 开源仿生机器鱼 产品介绍 应用案例 技术参数 使用手册 Menu 产品介绍 应用案例 技术参数 使用手册 前往淘宝 产品简介 Shark680是朝闻道研发的水下仿生机器鱼,灵感源自鱼类生理结构。它支持智能集群协作,具备优异的隐蔽性和军事侦察能力,能在复杂水域中高效执行任务。 产品特点 仿鲨鱼设计 运动灵活 性能强劲 超长续航 集群编队 丰富接口 二次开发 代码开源 C++ Python ROS 使用教程 高机动性 采用三关节摆动设计,灵感来自鱼类游动机制。精密的三关节使机器鱼在复杂水下环境中游刃有余,轻松应对狭缝、障碍、精确定位和探索任务,展现优异性能。 沉浮调节 通过调节内部机械结构的重心和浮心,仿生鱼可实现下沉或上浮。移动重心部件可增加下沉力,而调整重心位置使浮心上移,则利用浮力使其上升。 代码开源 机器鱼性能卓越,配备多种接口支持二次开发。无论是提高控制精度还是拓展应用场景,这些接口都能满足需求,提供无限可能。 移动机器人研发和制造商,运往全球50+个国家 仿鲨鱼设计 以深海霸主鲨鱼为参考,采用鲨鱼外形设计。这赋予了仿生机器鱼优雅的外观,减少了运动时的阻力,使得仿生机器鱼在执行任务时能够更为迅速、敏捷。 仿生鱼集群控制 每个仿生鱼具备智能决策能力,根据指令和环境信息调整自身位置和速度。在集群控制下,它们根据周围环境和其他成员状态,自动协调,保持整体一致。 仿生机器鱼集群编队系统 仿生机器鱼集群编队系统利用光学定位技术,支持多种定位系统和集群通信。通过统一控制接口,实现仿生机器鱼的集群编队和协同控制,确保按规划路线运动。 总体设计框架 系统由地面站、无线发射器、摄像头、水池和机器鱼组成。PC分析摄像头图像,根据不同情况规划路径,并通过串口和无线模块将控制策略返回给机器鱼。 集群协同系统 系统包括定位系统、集群控制单元、通讯设备和仿生机器鱼。定位系统提供信息,控制单元发指令,机器鱼执行任务,通讯设备确保信息畅通,实现高效协同。 仿生机器鱼集群编队系统特点 协同决策 通过控制算法和通信技术,实现仿生鱼之间的信息共享。基于共享的信息,仿生鱼之间能够协同制定决策,以适应环境变化和任务需求。 分布式控制 每只仿生鱼具备自主决策能力,无需完全依赖中央控制单元。这使得鱼群在复杂水域中能迅速调整编队和行进策略,展现出高度的灵活性和适应性。 任务分配 集群根据任务和环境变化实时调整编队和任务分配,避免资源浪费和重复劳动,提高效率,优化资源利用,确保在变化环境中保持最佳表现和协调性。 产品功能 机器鱼原理教学水下生物探究流体研究环境监测水下勘探观赏 应用案例 技术参数 产品名称规格详细数据Shark680外形设计仿真鲨鱼重量4.0kg尺寸680mmx290mmx303mm续航时间3~5小时待机时间12小时工作电压8.4V最大速度0.5m/s最大工作深度0.5m最小转弯半径1m运动控制关节数量3个重心控制关节数量1个运动方式三关节摆动,尾鳍推进定位相机像元尺寸4.5 μm×4.5 μm靶面尺寸1/1.7″ 分辨率1624×1240 最大帧率90fps@1624×1240 Bayer RG8 动态范围71.5 dB信噪比43.7dB 曝光时间超短曝光模式:1 μs ~ 5 μs 正常曝光模式:6 μs ~ 10 s 数据接口USB 3.0,兼容USB 2.0 外形尺寸29mm×29mm×30mm 水池平台尺寸4m*4m*1m材质PVC+防锈镀锌管主动流量控制平台平台尺寸3.6m*3.6m*0.6m材质亚克力+铝合金嵌入式控制单元供电电压5-8.4VPWM接口24路usb免驱动支持在线调试支持脱机运行支持电源适配器直流电压24V额定电流3000W纹波及噪声<150mV电压精度±1%输出电压调节范围0-24V过载保护105%-135%类型;恒流输出+V0降至欠压点,切断输出,复位重新上电过温保护RTH3; 风机常转,≥90℃关闭输出水流量生成器螺旋桨直径60mm最大耐压深度20m密封方式免维护全密封密封结构旋转动密封结构额定推力3.8kgf(正向)/2.5kgf(反向)额定功率178W额定电压24VDC重量320g流速仪测量范围0.0.1-4.00M/S测量方式测杆定位测量测流误差≤1.5%温度范围0℃~50℃电源DC7.2V锂电池充电电池,充满可连续工作10小时以上地面控制平台CPUX86架构Intel酷睿i5处理器主频3.0GHz-4.7GHz内存8GB硬盘256G固态硬盘网络千兆以无线网屏幕分辨率1920×1080屏幕尺寸大于13英寸 Shark680 开源仿生机器鱼 ¥**** 起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。
产品名称规格详细数据Shark680外形设计仿真鲨鱼重量4.0kg尺寸680mmx290mmx303mm续航时间3~5小时待机时间12小时工作电压8.4V最大速度0.5m/s最大工作深度0.5m最小转弯半径1m运动控制关节数量3个重心控制关节数量1个运动方式三关节摆动,尾鳍推进定位相机像元尺寸4.5 μm×4.5 μm靶面尺寸1/1.7″ 分辨率1624×1240 最大帧率90fps@1624×1240 Bayer RG8 动态范围71.5 dB信噪比43.7dB 曝光时间超短曝光模式:1 μs ~ 5 μs 正常曝光模式:6 μs ~ 10 s 数据接口USB 3.0,兼容USB 2.0 外形尺寸29mm×29mm×30mm 水池平台尺寸4m*4m*1m材质PVC+防锈镀锌管主动流量控制平台平台尺寸3.6m*3.6m*0.6m材质亚克力+铝合金嵌入式控制单元供电电压5-8.4VPWM接口24路usb免驱动支持在线调试支持脱机运行支持电源适配器直流电压24V额定电流3000W纹波及噪声<150mV电压精度±1%输出电压调节范围0-24V过载保护105%-135%类型;恒流输出+V0降至欠压点,切断输出,复位重新上电过温保护RTH3; 风机常转,≥90℃关闭输出水流量生成器螺旋桨直径60mm最大耐压深度20m密封方式免维护全密封密封结构旋转动密封结构额定推力3.8kgf(正向)/2.5kgf(反向)额定功率178W额定电压24VDC重量320g流速仪测量范围0.0.1-4.00M/S测量方式测杆定位测量测流误差≤1.5%温度范围0℃~50℃电源DC7.2V锂电池充电电池,充满可连续工作10小时以上地面控制平台CPUX86架构Intel酷睿i5处理器主频3.0GHz-4.7GHz内存8GB硬盘256G固态硬盘网络千兆以无线网屏幕分辨率1920×1080屏幕尺寸大于13英寸

































{kind=link}
{kind=link}
{kind=link}
{kind=link}