ROS机器人
Gemini
仿工业AGV设计小型ROS机器人
Gemini-O
全向运动小型ROS机器人
Cutebot
四轮差速小型ROS机器人
Stone
两轮差速复合机器人
Giraffe
独立悬挂两轮差速复合机器人
开源无人机
Q300
模块化小型室内开源无人机
Q600
室外开源无人机
Shark680
开源仿生机器鱼
智能无人车
Turtle
智能差速AGV机器人
Thunder
独立悬挂差速四驱越野无人车
Thunder Mini
小型独立悬挂差速四驱无人车
Octopus
麦克纳姆全向无人车
Soldier
特种履带全地形机器人
GeoScan S1
便携高效,实时建图利器
GeoScan S2
开启空间的智能纪元
RS-URSD
无人机实时地图测绘系统
科研平台
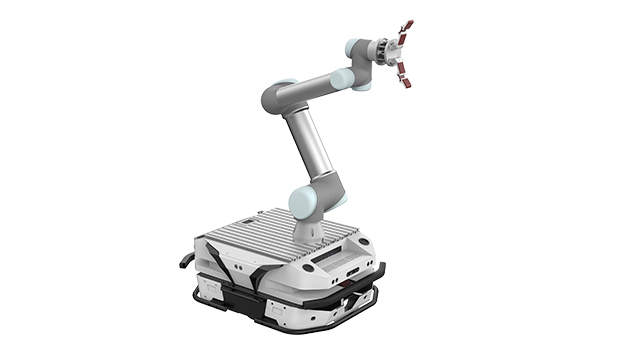
RS-AGR
智慧农业采摘机器人平台
RS-INS
5G安防巡检机器人平台
RS-MUL
空地协同编队系统
核心零件
ROS-IMU
惯性测量单元
T-RTK UM982
高性价比模块化卫星定位模组
G-T200
力控二指夹爪
Mesh
百公里级无线自组网模块
QuickLink
即插即用,自适应自控制才是 “ 真智换 ”
智慧农业采摘机器人平台包括移动平台、机械臂、执行器、视觉系统和控制系统。它支持自主导航、智能避障、果蔬识别、动态误差校准及作业量控制,能进行无人路径规划和定点停靠。
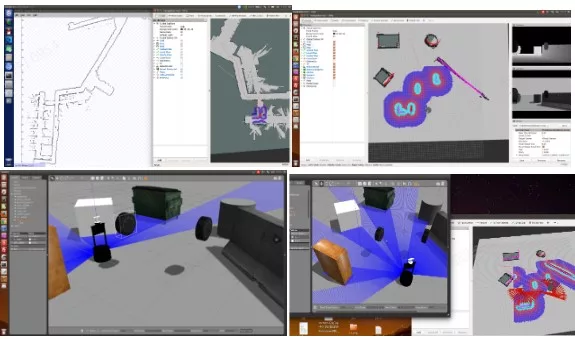
搭载多种先进传感器,通过融合技术精准感知环境。内部系统利用先进算法处理数据,制定最优避障策略,实现实时障碍物识别和安全路径规划,有效降低碰撞风险。
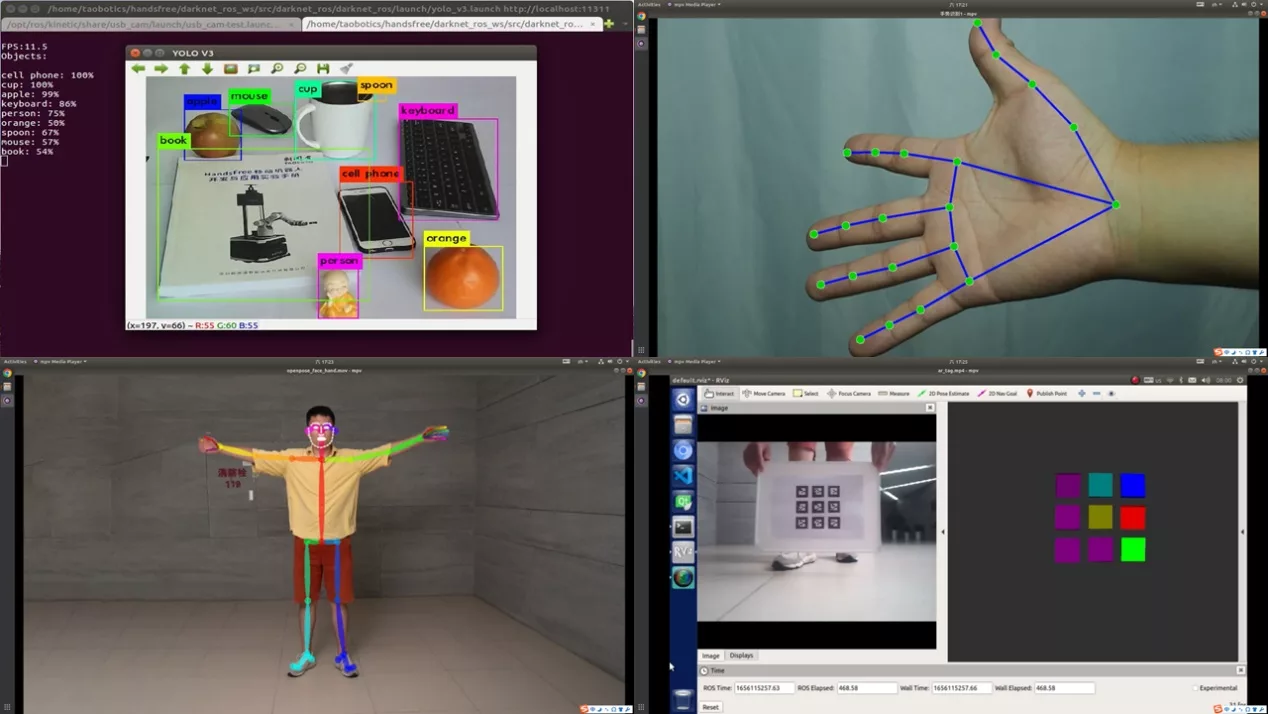
配备深度摄像头和先进的图像处理算法,实现快速的目标物体识别和定位。结合精密机械臂和灵活机械爪,实现了对目标物体的灵活操作和稳定抓取。
集成图像识别与人工智能技术,机器人实时捕捉并分析果蔬图像。利用深度学习算法,快速准确地识别果蔬种类,实现高效分类和处理。
搭载先进机械臂规划系统,提供高精度和高效率。系统利用复杂算法和高速计算精细规划每个动作,自动调整路径和速度,适应不同环境和任务需求,确保精准操作。
平台集成六款智能无人车和多款机械臂,支持根据研究需求自由组合,模拟复杂农业环境。为精准农业、作物监测、病虫害识别等研究提供实验支持。
智能无人车、协作机械臂及其他农业智能设备可作为独立模块选择和组合。模块化设计提供了前所未有的灵活性,简化了操作和维护流程。








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}