Mini Arm 桌面6轴机械臂
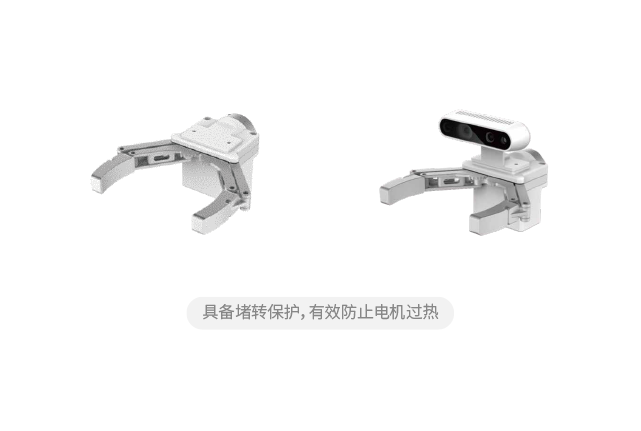
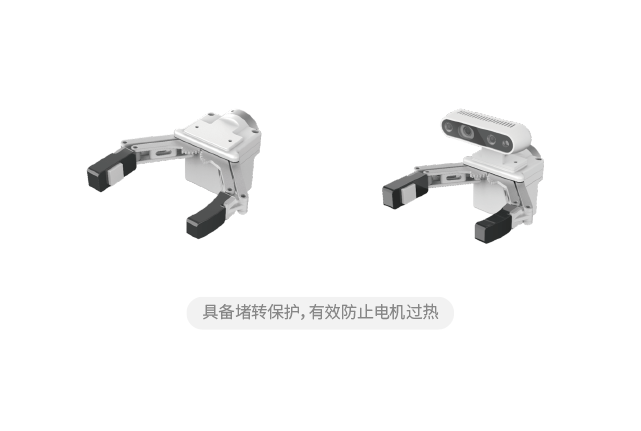
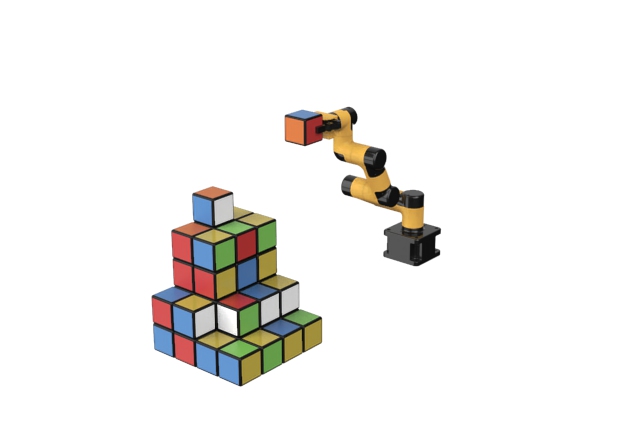
MINI Arm是一款专为科研教学而推出的开源六轴桌面级机械臂,基于ROS系统,支持RVIZ和Gazebo仿真,支持Moveit轨迹规划开发,重复定位精度可达0.2mm,尤其适合进行机械臂的运动教学、轨迹规划教学,同时末端配置有视觉单元,结合AI进行相关的视觉伺服、智能抓取、搬运等场景教学及科研开发 。

Mini Arm 桌面6轴机械臂
轴数
6轴本体+1外部轴
臂长
350mm
额定/ 最大负载
100g / 200g
重复定位精度
垂直士0.2mm
电源
8.4VDC/5A
整机重量
790g (不含夹爪)
Mini Arm 桌面6轴机械臂
工作环境
-5°~45°
有效工作半径
280mm
关节运动度-大臂
左右士165° 垂直士165°
关节运动度-小臂
左右士165° 垂直士165°
关节运动度-腕部