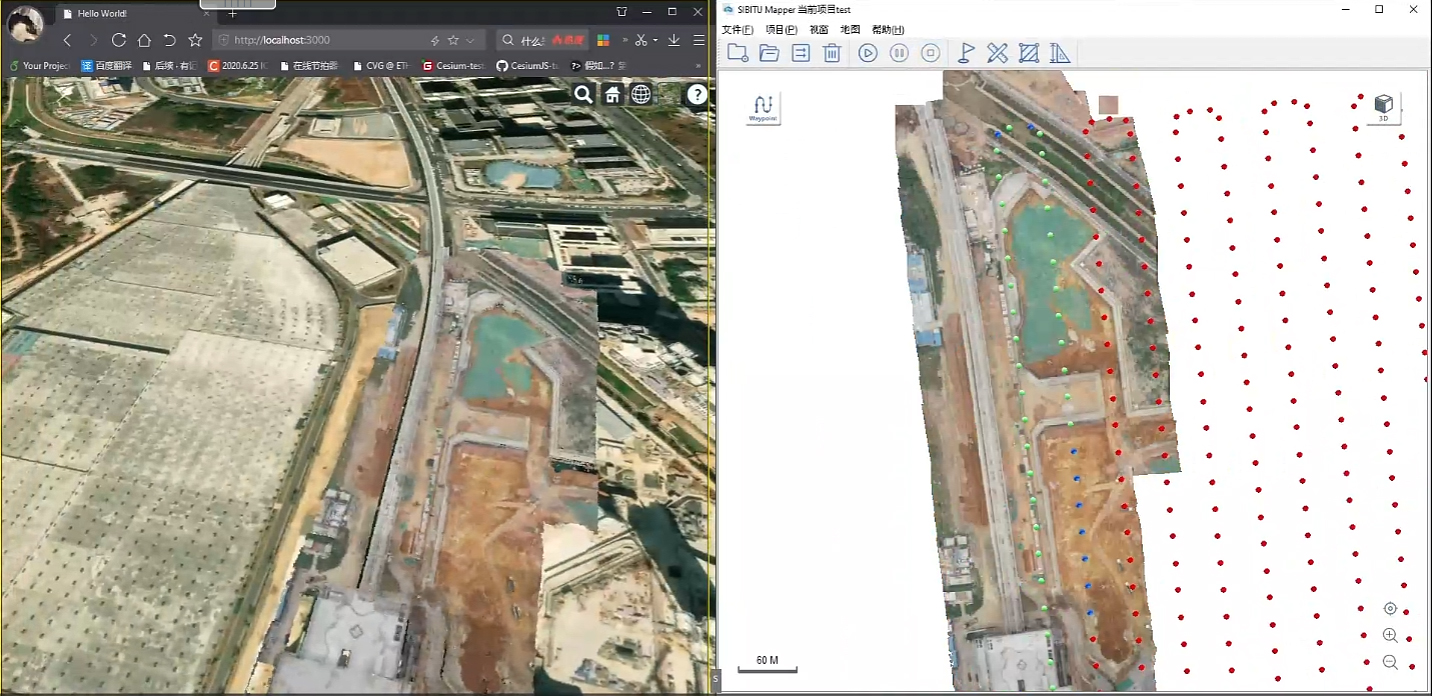
西北工业大学无人系统智能感知与控制实验室推出了集群无人机实时地图重建系统,利用地图重建和深度学习技术,支持离线、实时二维及三维地图重建。该系统为农业、应急消防和公共安全巡检等领域提供快速环境信息获取、分析和决策支持。
规格标配高配起飞重量 (约) 3.3kg最大起飞重量 (约) 4.8kg对角轴距600mm最长飞行时间约42min悬停精度±40cm机载主机型号Jetson NanoJetson Xavier NXCPUQuad-core ARM® Cortex®-A57 MPCore Processor6 核 NVIDIA Carmel ARM®v8.2 64 位 CPU 6MB L2 + 4MB L3GPU128-core NVIDIA Maxwell™ architecture GPU搭载 48 个 Tensor Core 的 384 核 NVIDIA Volta™ GPU内存4GB8GB存储容量64GB64GBAI性能472 GFLOPS21 TOPS飞控处理器STM32处理器传感器内置陀螺仪、加速度计、电子罗盘、气压计深度相机RGB视场角/71°x43.7°RGB分辨率&帧率/1920*1080,30fps (最大) 深度视场角/67.9°x45.3°深度分辨率&帧率/640×400,30fps (最大) 深度距离/0.3~3m深度精度/±1-6mm (1米内)高清吊舱(选配)光学变焦10倍最小对焦距离200mm数据传输支持以太网口传输视频分辨率2K视频帧率30fps (最大) 高清摄像头数量2像素800万分辨率&帧率1920×1080,30fps (最大) 定位模块(RTK) 刷新率20Hz定位精度0.01m+1ppm CEP收敛时间<60s图数一体遥控器尺寸308mmx148mmx72mm通道数量16通道距离15 km屏幕7 英寸触摸屏充电时长3.5小时 (30W 快充) 续航时间10小时半固态动力锂电池充电限制电压26.7V标称电压23.7V容量11000mAh












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}