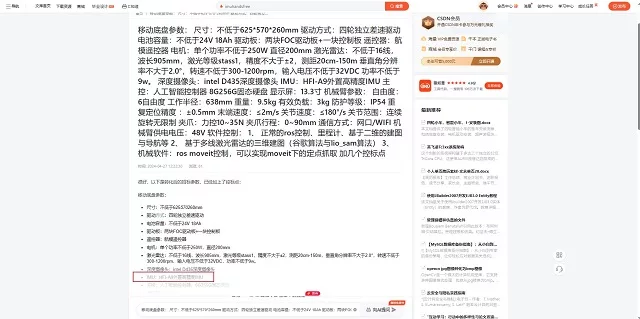
规格加速度计陀螺仪磁力计自由度333ADC分辨频率±8g 4096LSB/g±2000°/s 16.38LSB/(°/s)±1.3Gauss 1090LSB/Gauss带宽256Hz Max256Hz Max–非线性0.6%fs0.3%fs0.1%fs噪声密度0.5mg/√Hz0.01°/s/√Hz–内部采样率1kHz4kHz160Hz Max 参数ROLLPITCHYAW分辨率0.01°0.01°0.01°角度范围±180°±90°0~360°静态启动精度0.1°0.1°0.1°动态精度0.5°0.5°≤1.5°/min重复性<0.5°<0.5°<0.5°位置偏移<0.2°/h<0.2°/h10°/h开机零偏<0.5°<0.5°<0.2°









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}