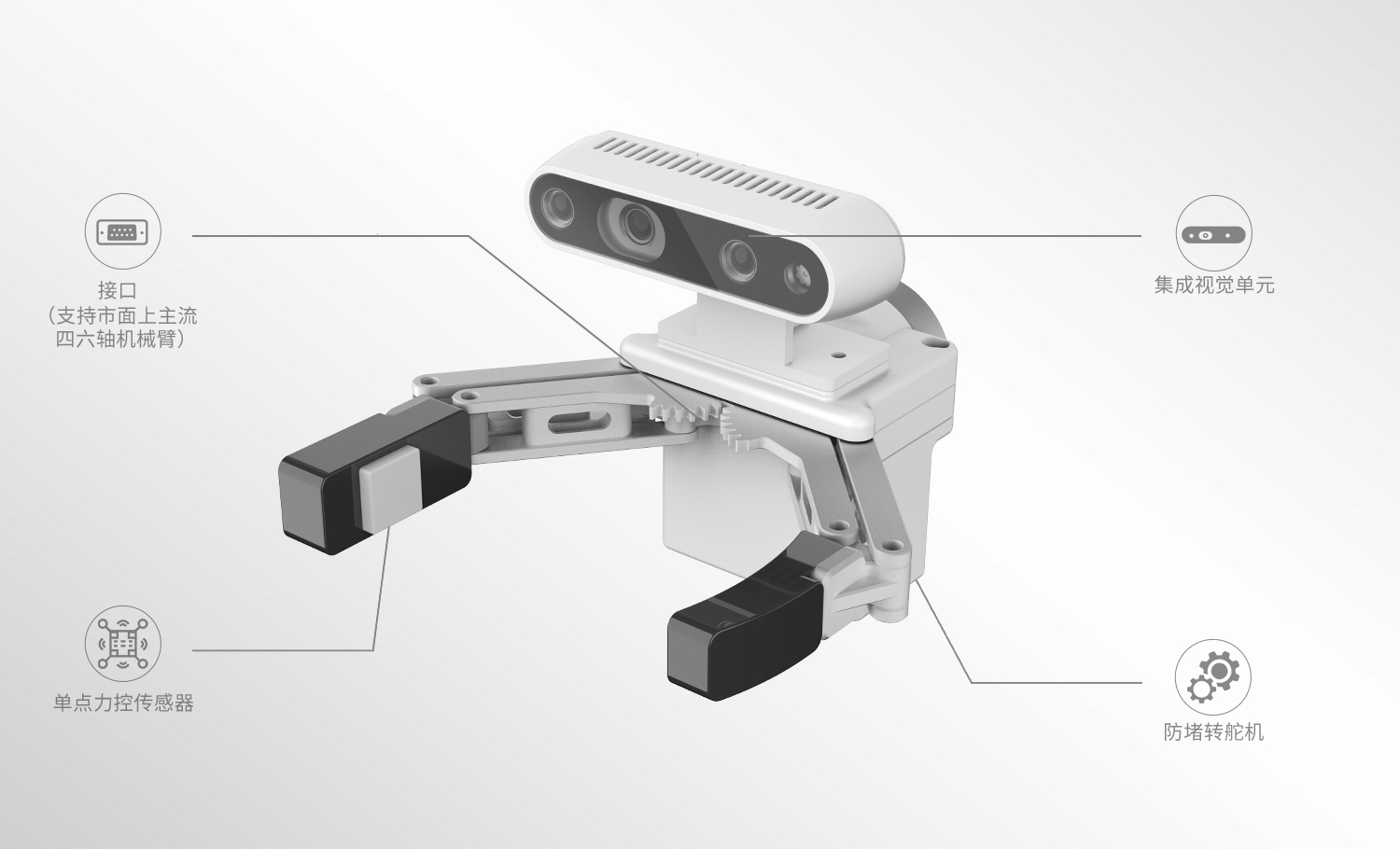
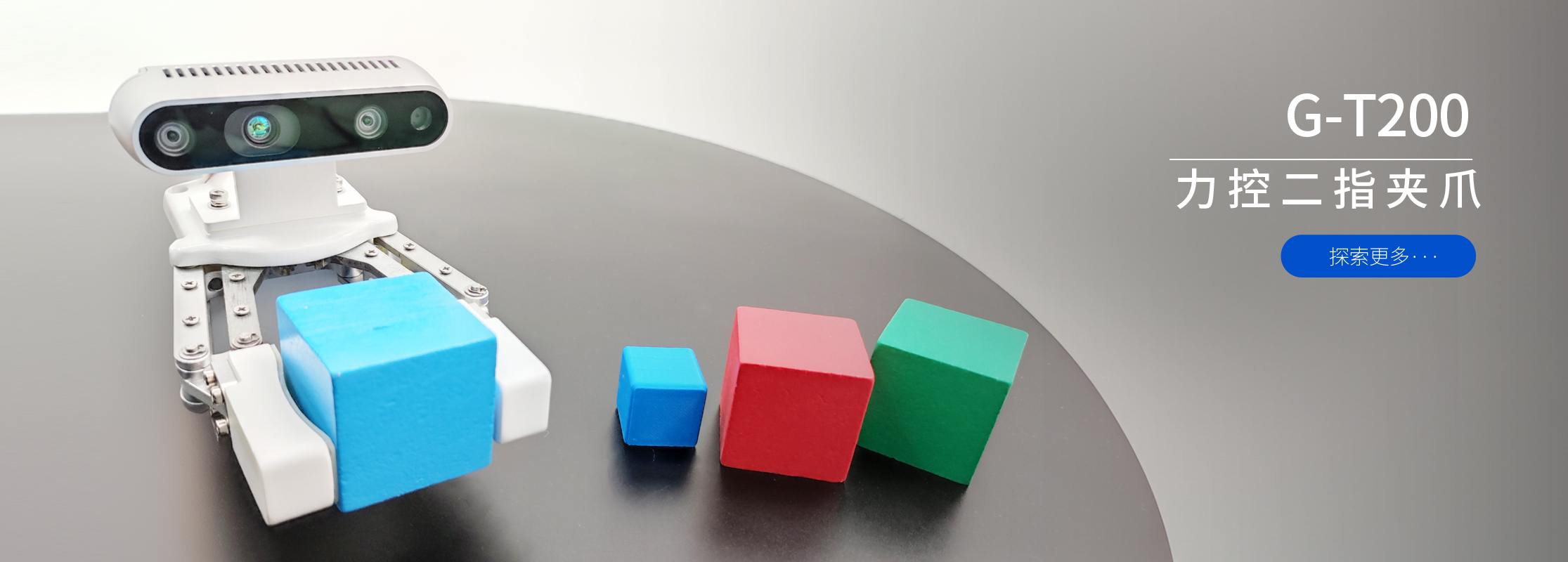
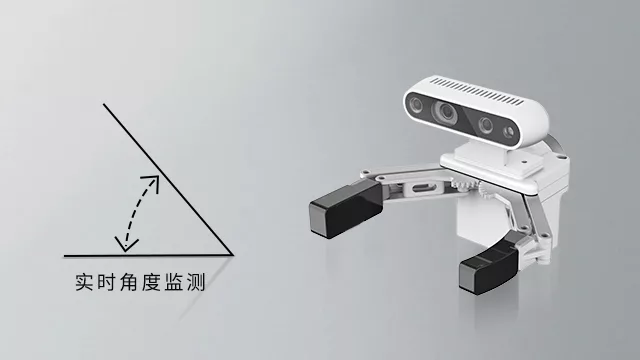
规格参数电控机械夹爪尺寸135mmx72mmx55mm重量0.25kg抓取方式平行抓取关节速度90°/s(可调)夹持宽度0-100mm抓取精度<1mm工作电压(v)24V通信接口PWM IO控制抓取负载1kg手眼(深度立体相机)RGB视场角85.2°x58°(±3°)RGB分辨率&帧率1920×1080,30fps(最大)深度视场角69.4°x42.5°(±3°)深度分辨率&帧率1280×720,30fps(最大)深度距离0.1~3m深度精度<%2(2m内)






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}