ROS机器人
Gemini
仿工业AGV设计小型ROS机器人
Gemini-O
全向运动小型ROS机器人
Cutebot
四轮差速小型ROS机器人
Stone
两轮差速复合机器人
Giraffe
独立悬挂两轮差速复合机器人
开源无人机
Q300
模块化小型室内开源无人机
Q600
室外开源无人机
Shark680
开源仿生机器鱼
智能无人车
Turtle
智能差速AGV机器人
Thunder
独立悬挂差速四驱越野无人车
Thunder Mini
小型独立悬挂差速四驱无人车
Octopus
麦克纳姆全向无人车
Soldier
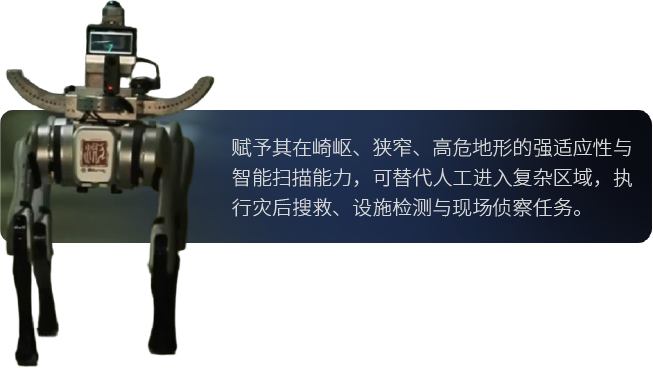
特种履带全地形机器人
GeoScan S1
便携高效,实时建图利器
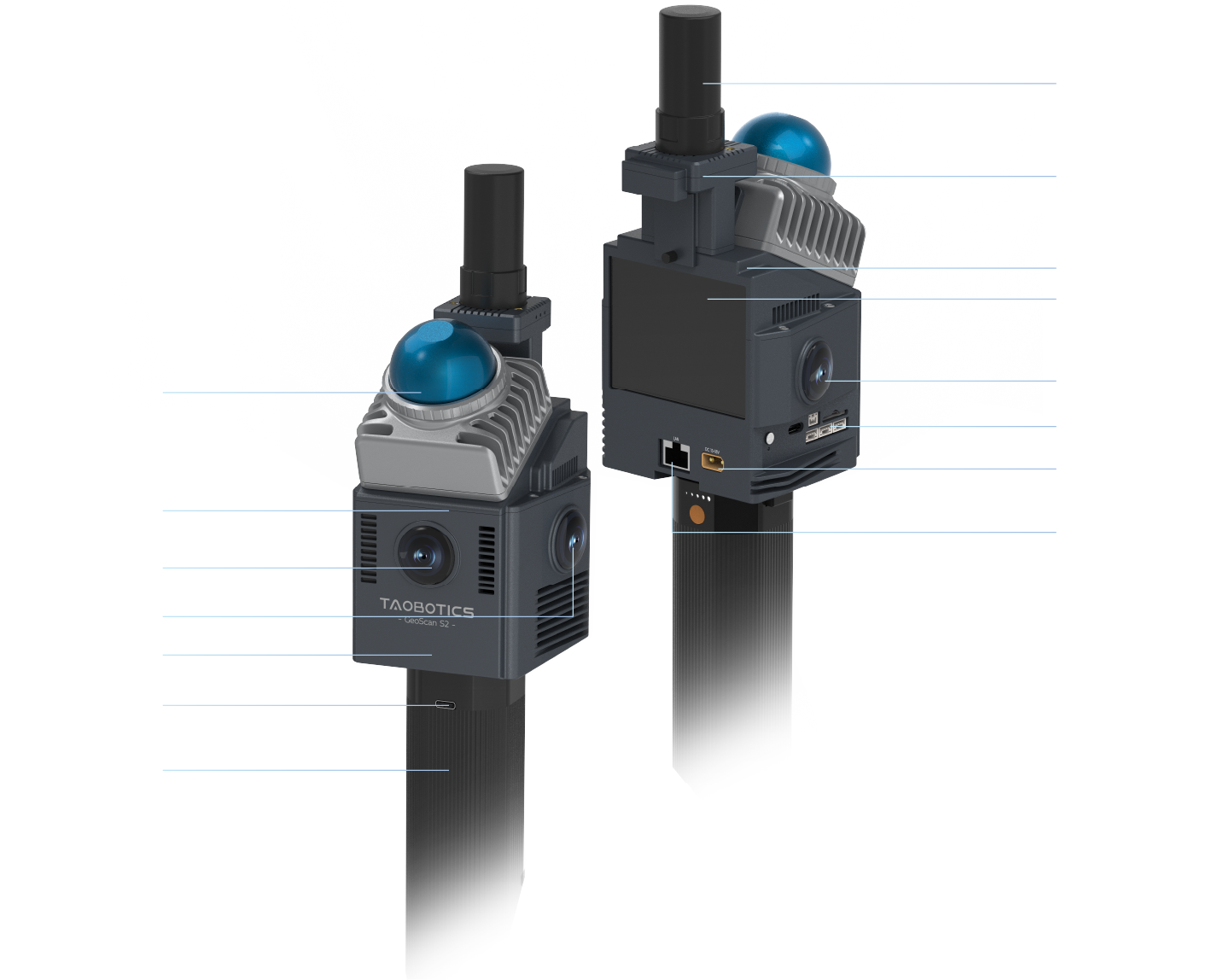
GeoScan S2
开启空间的智能纪元
RS-URSD
无人机实时地图测绘系统
科研平台
RS-AGR
智慧农业采摘机器人平台
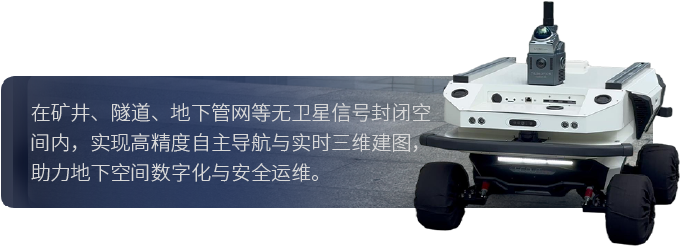
RS-INS
5G安防巡检机器人平台
RS-MUL
空地协同编队系统
核心零件
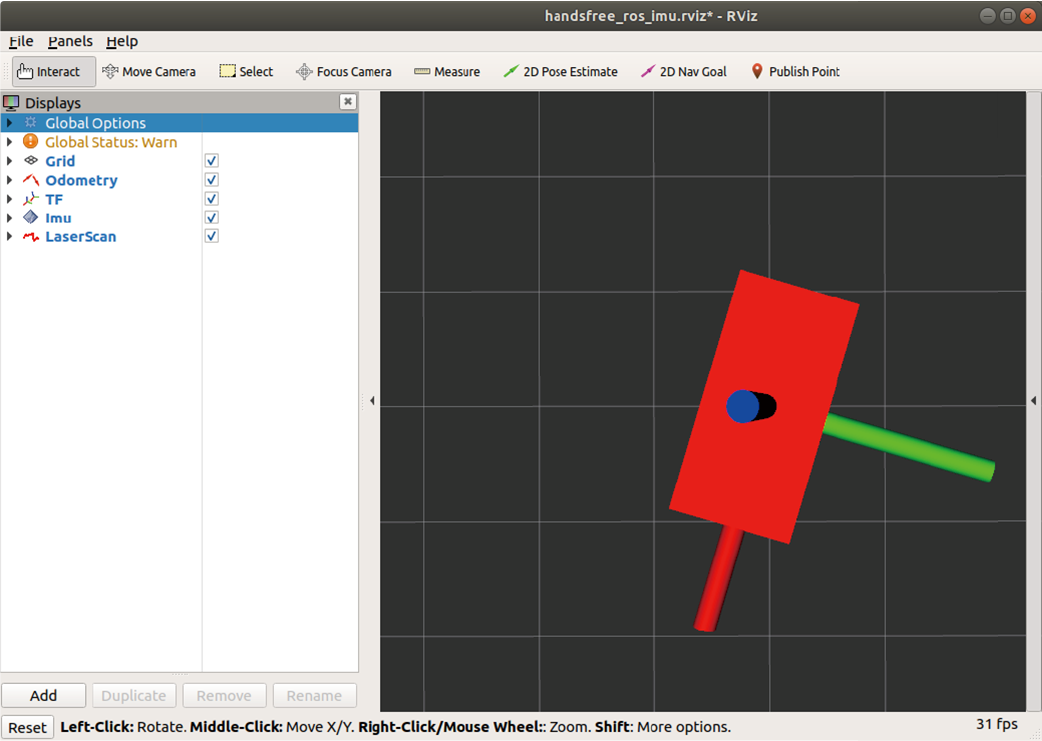
ROS-IMU
惯性测量单元
T-RTK UM982
高性价比模块化卫星定位模组
G-T200
力控二指夹爪
Mesh
百公里级无线自组网模块
QuickLink
即插即用,自适应自控制才是 “ 真智换 ”
GeoScan手持三维激光扫描仪系列产品由深圳朝闻道科技携手同济大学研发。设备支持实时生成厘米级彩色三维地图及高逼真3D高斯模型。
得益于强大的机载算力与丰富接口,它可集成无人机和机器人,并支持远程操控与超视距数据监测,续航达150分钟,单次建图120分钟,建模面积超百万平方米。即便在车载40公里时速及非铺装路面剧烈颠簸的严苛环境下,仍能稳定工作。
历经上百项实战检验,GeoScan精准赋能地理测绘、建筑施工、林业资产、游戏考古、城市数字化等领域。
机身预留丰富的机器人二次开发接口
摆脱对额外设备依赖
保证数据获取安全
实时采集-建模-预览导出
全过程机内完成
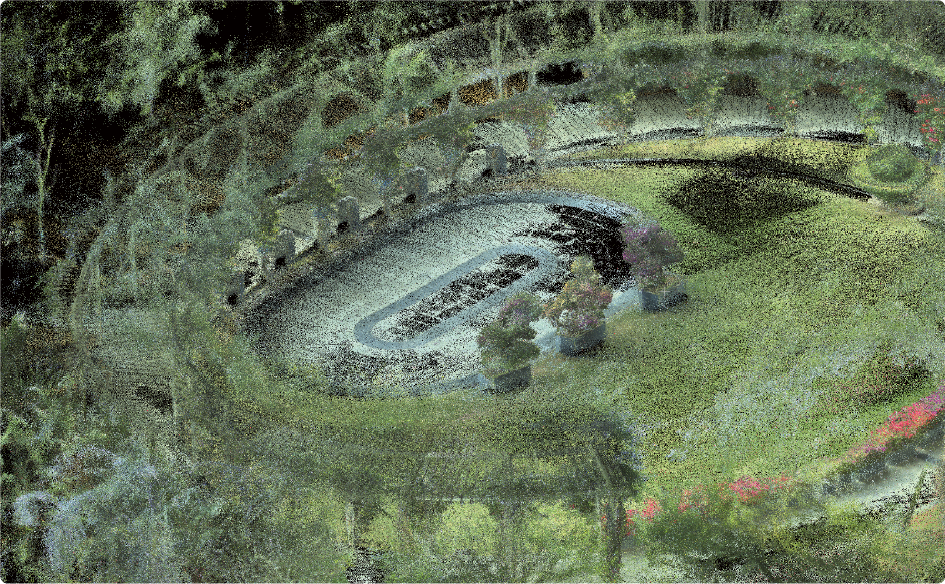
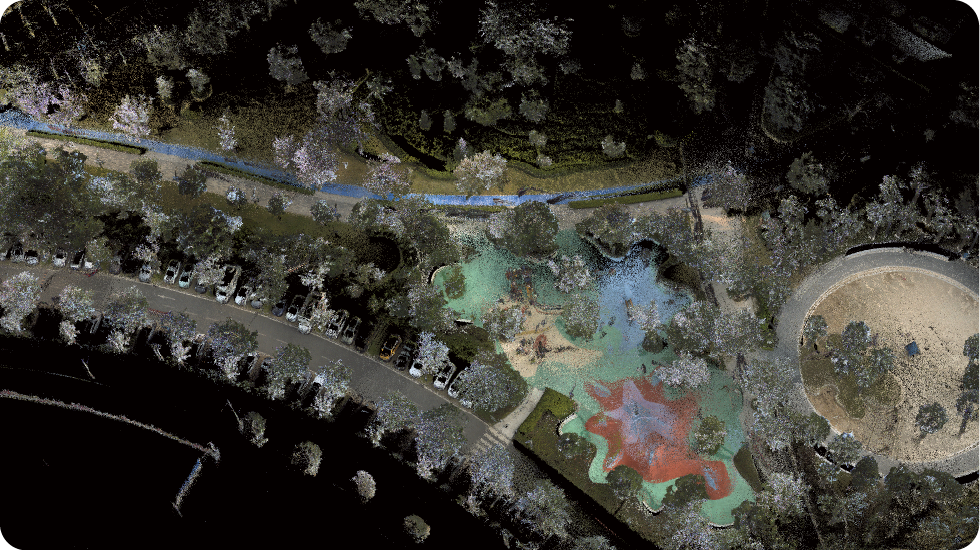
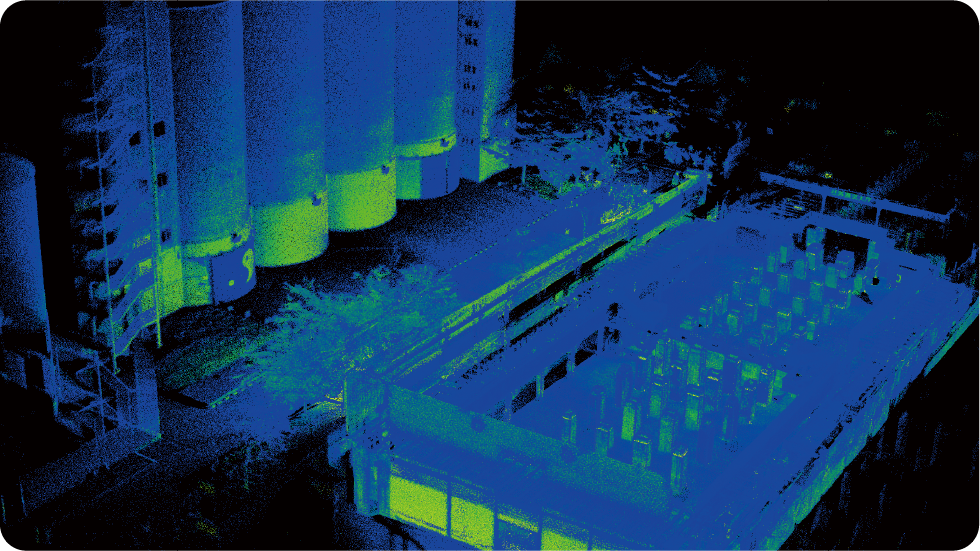
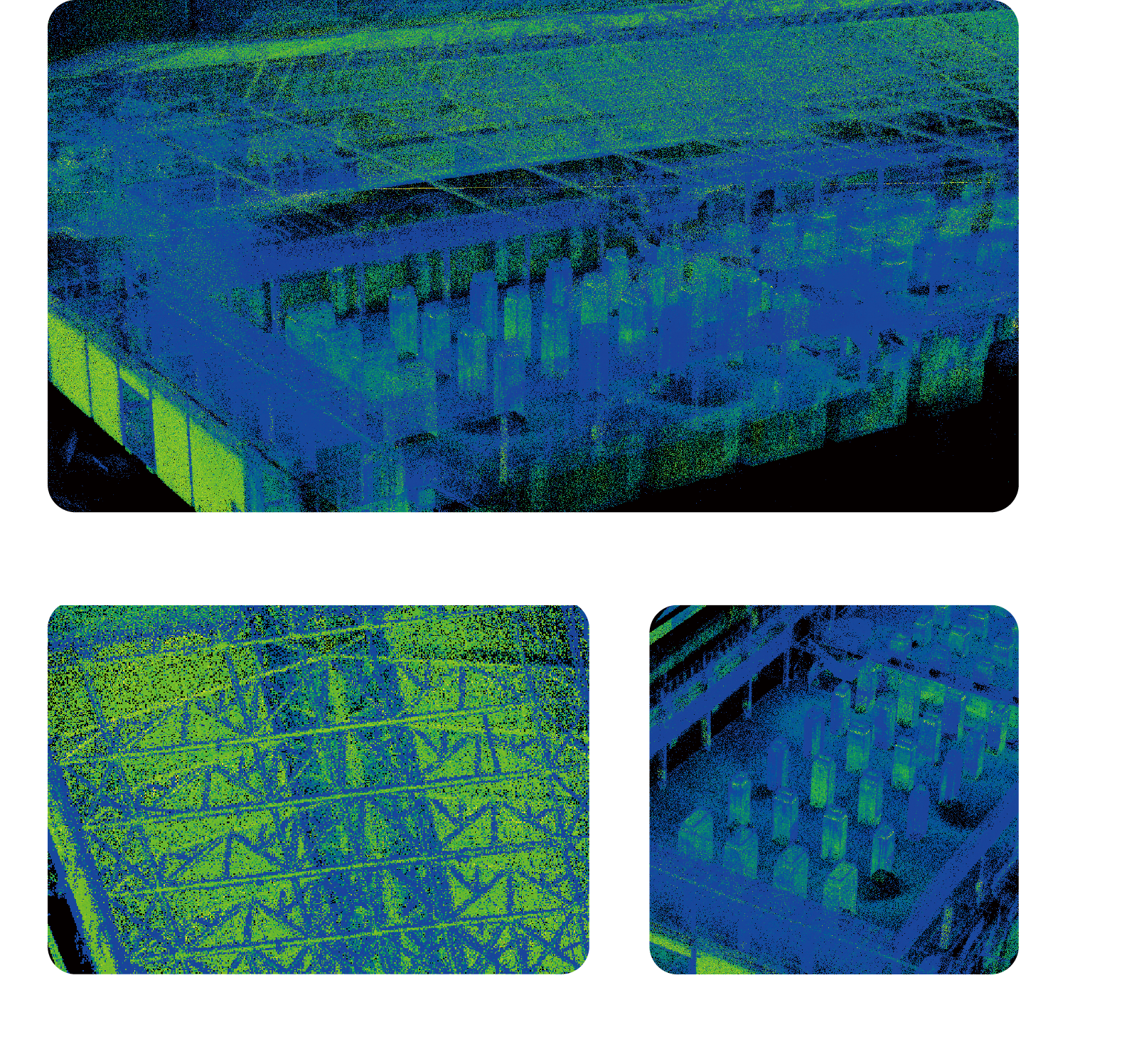
立柱投影
环形花园
彩色植被
道路细节
告别负重作业 实现效率与舒适度完美平衡
大场景数据一次性采集 减少拼接工作量
支持 ROS、Pixhawk等 开放生态
预留了网口、USB、串口、 CAN等机器人二次开发接口
单次作业面积超 100万平方米
一键获取实景真彩点云
内置多种建图模式
满足多样化任务需求
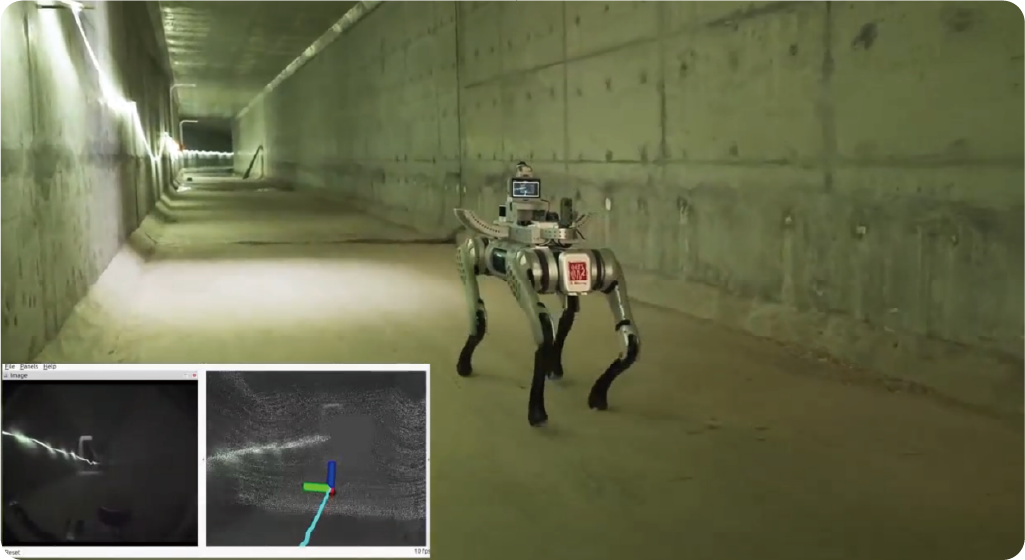
无视网络、GNSS与光线限制
复杂环境依旧精准
强力赋能测绘、林业、工程、智慧城市等多领域应用
扫描数据与任务指令可随时同步交互,让现场勘察与远程指挥无缝衔接
图像、地图、轨迹等多模态数据实时可视化,可远程执行采集任务
为应急现场三维态势感知、机器人巡检等使用场景提供数据基础和决策依据。
支持自行车、车载
高速行驶采集
高速环境
可持续稳定输出
40公里时速车载行进,非铺装路面强烈抖动等严苛使用条件下,依然稳定建图。
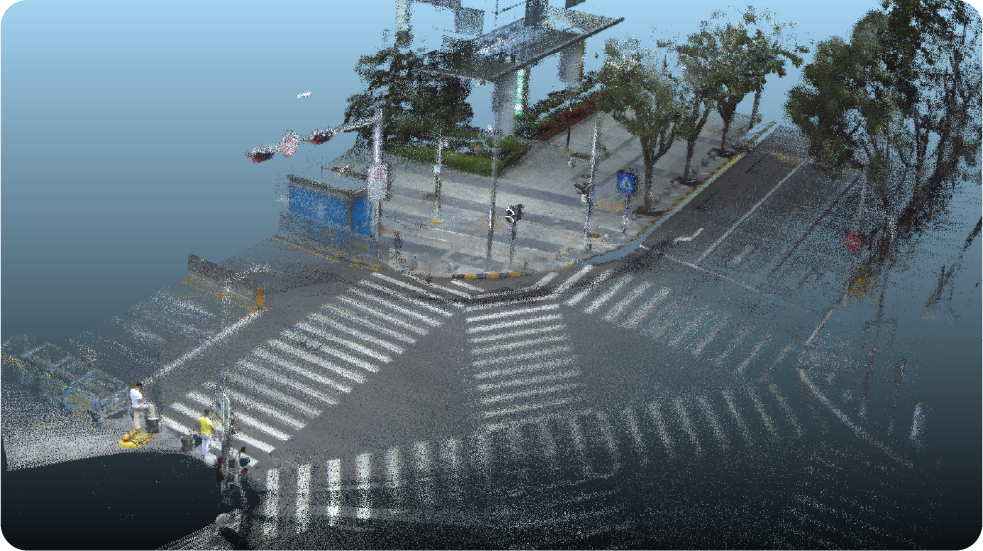
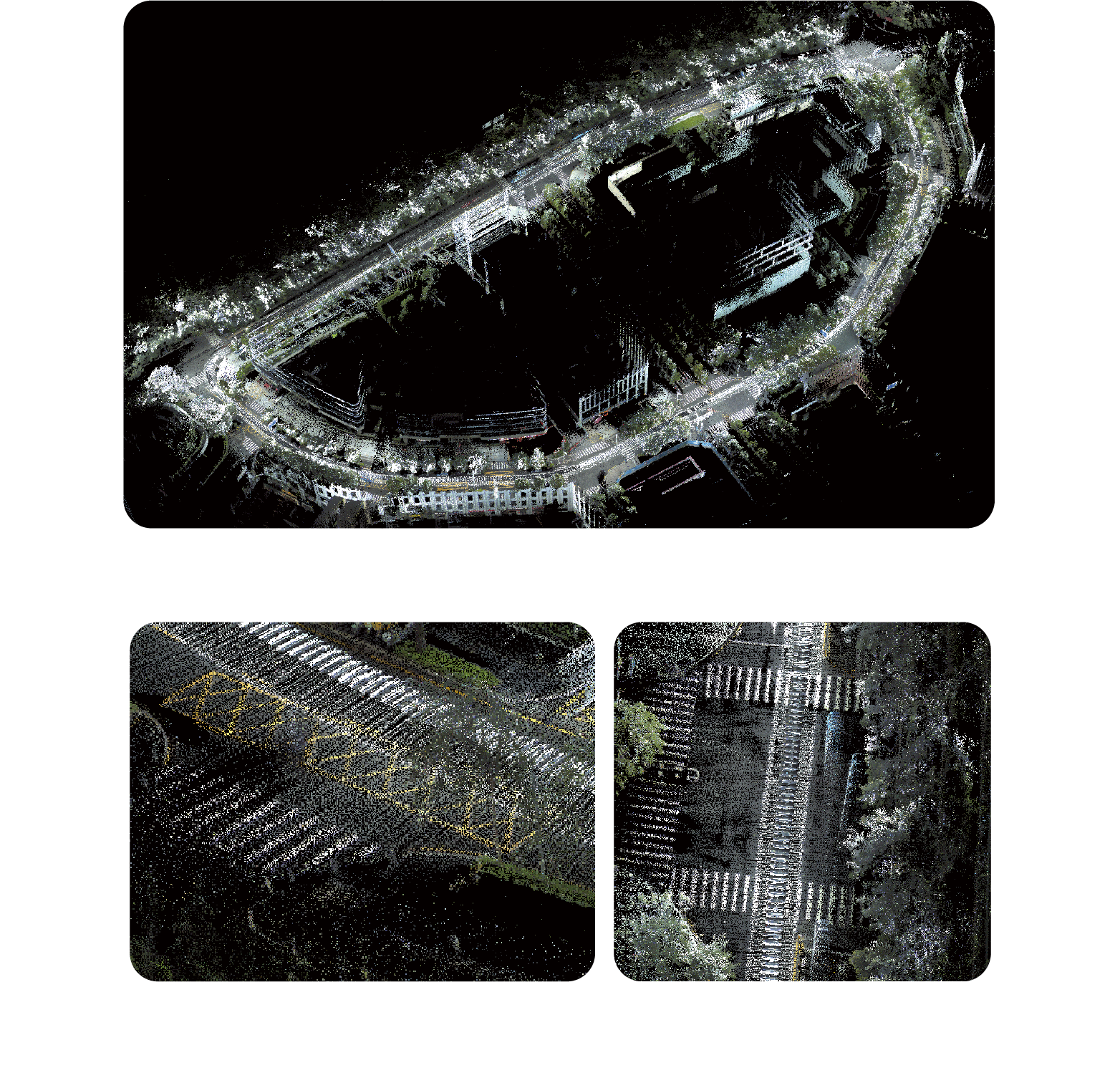
S2进行 40KM/h 高速行驶采集
10分钟车载点云街道采集
作为通用的智能感知模块
可一体赋能无人机、轮足机器人、无人车及机械狗四大平台
为其提供即插即用的高精度SLAM导航与实时建图能力
针对客户特殊使用场景
如消防应灾、智慧矿山、数字孪生
提供定制开发服务
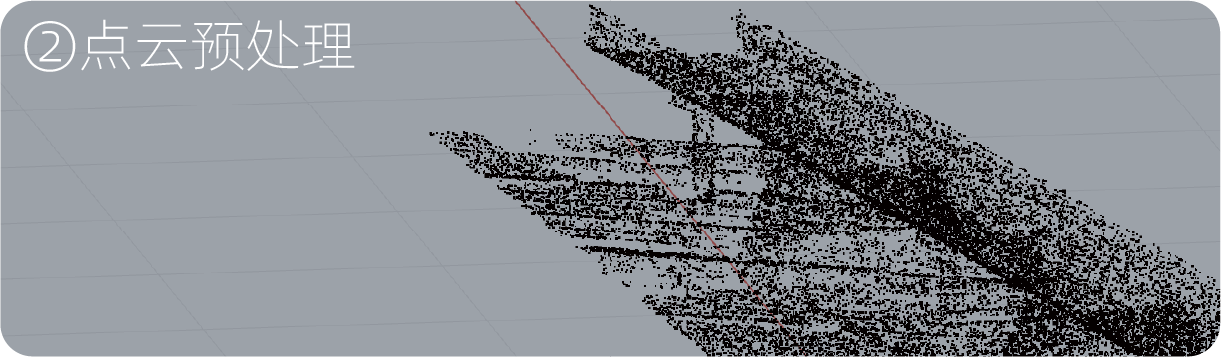
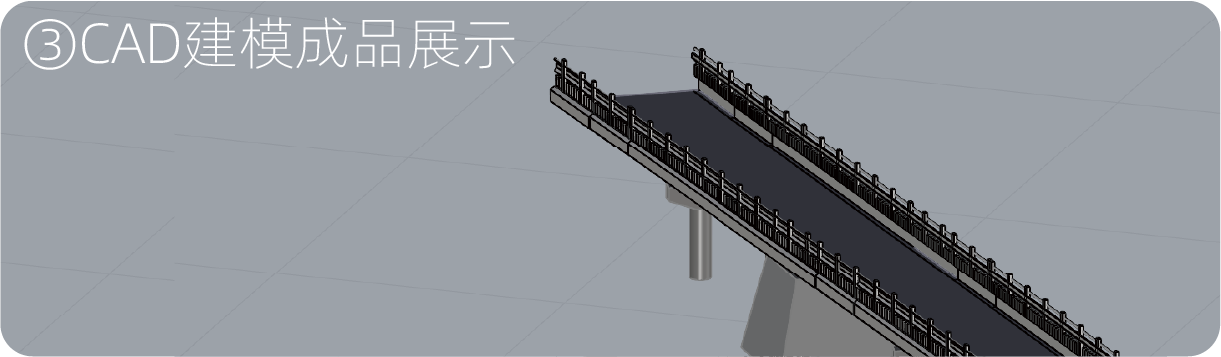
高精度点云数据驱动的
BIM逆向建模与CAD出图
实现建筑数字化与设计施工一体化的高效工作流
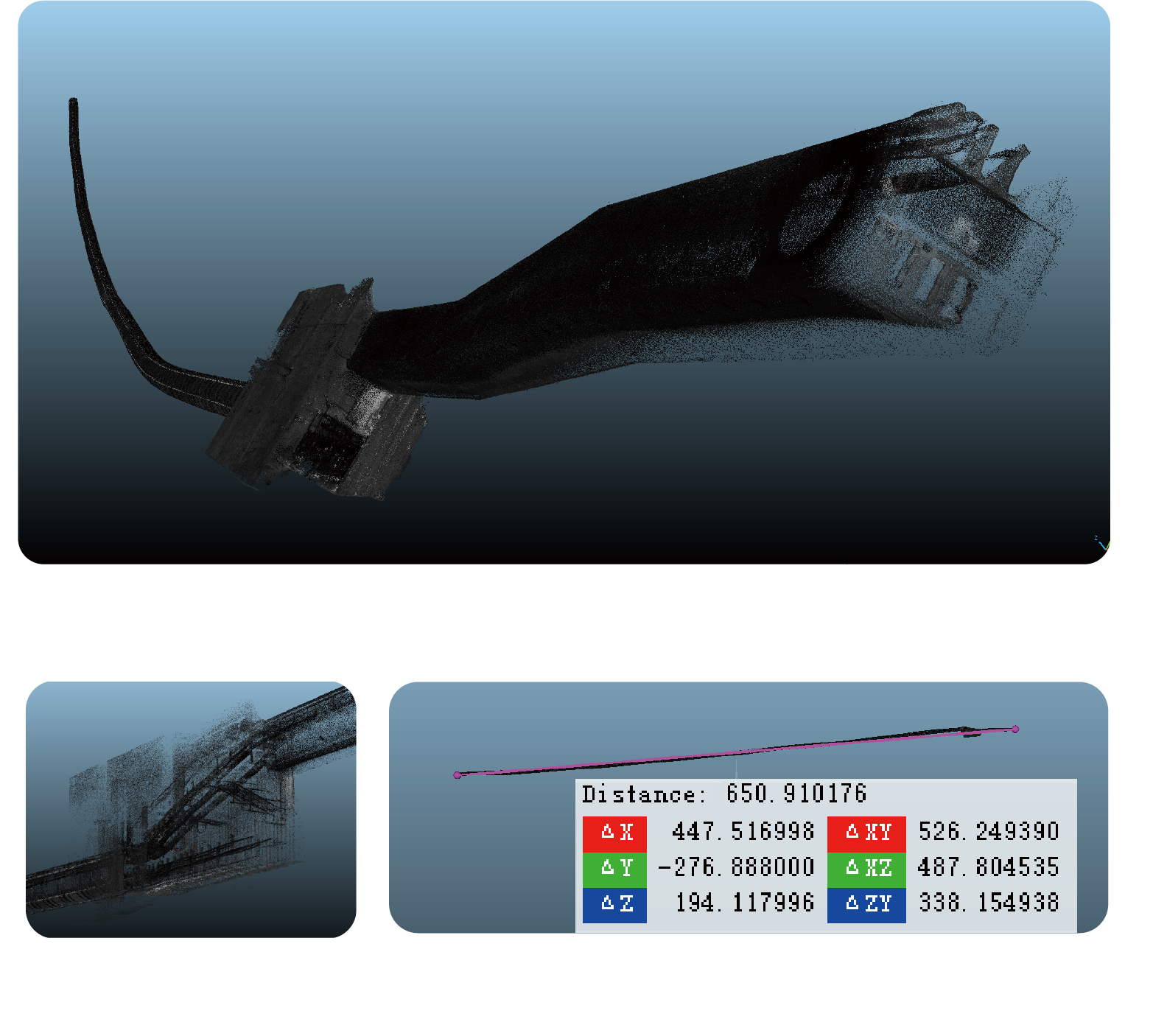
数据精准可视化误差率小于±3%操作流程简单快捷
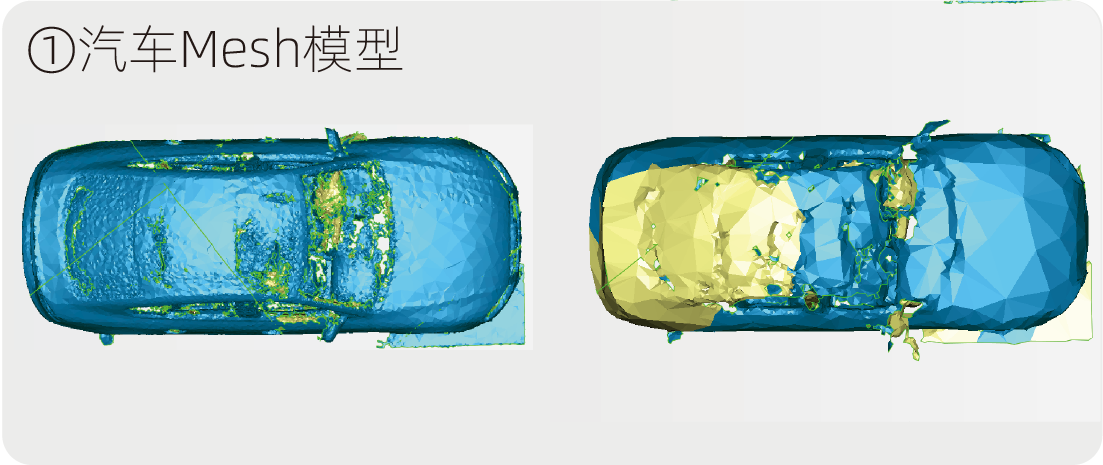
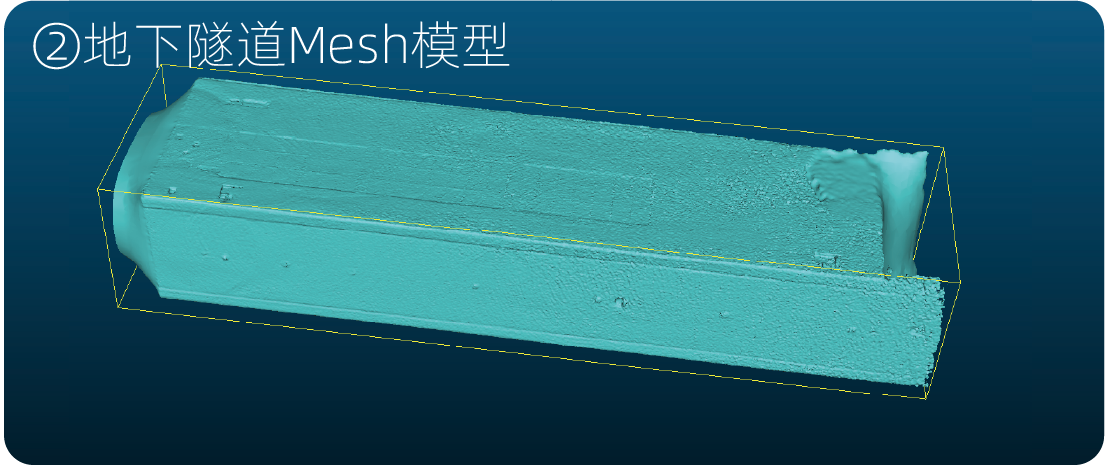
全面开放原始数据,可生成高精度 Mesh 模型
兼容各类数据处理应用
适配 SLAM 算法进行数据处理
GeoScan 历经上百实战项目验证
工业现场、国家工程、科研教育,均游刃有余
GeoScan搭载金安智能分户验收机器人精彩亮相,以创新技术推动工程监理行业智能化转型,开启行业高效转型新篇章。
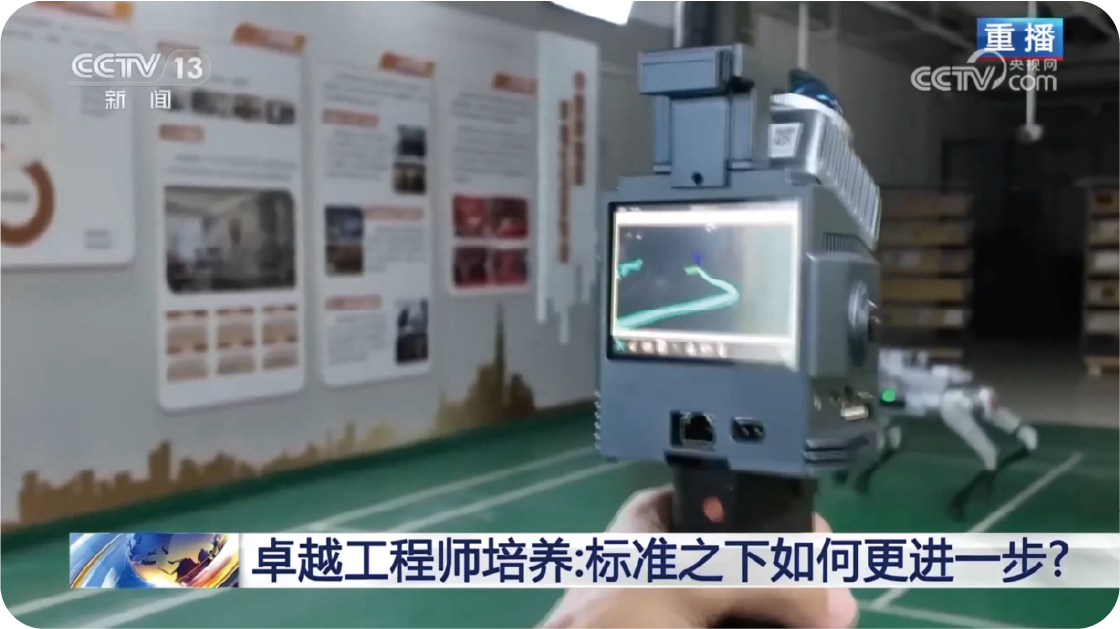
GeoScan亮相央视新闻。在关于“卓越工程师”培养的专题报道中,作为先进的教学与科研设备出镜,更代表了“产学研用”深度融合的创新项目成果。
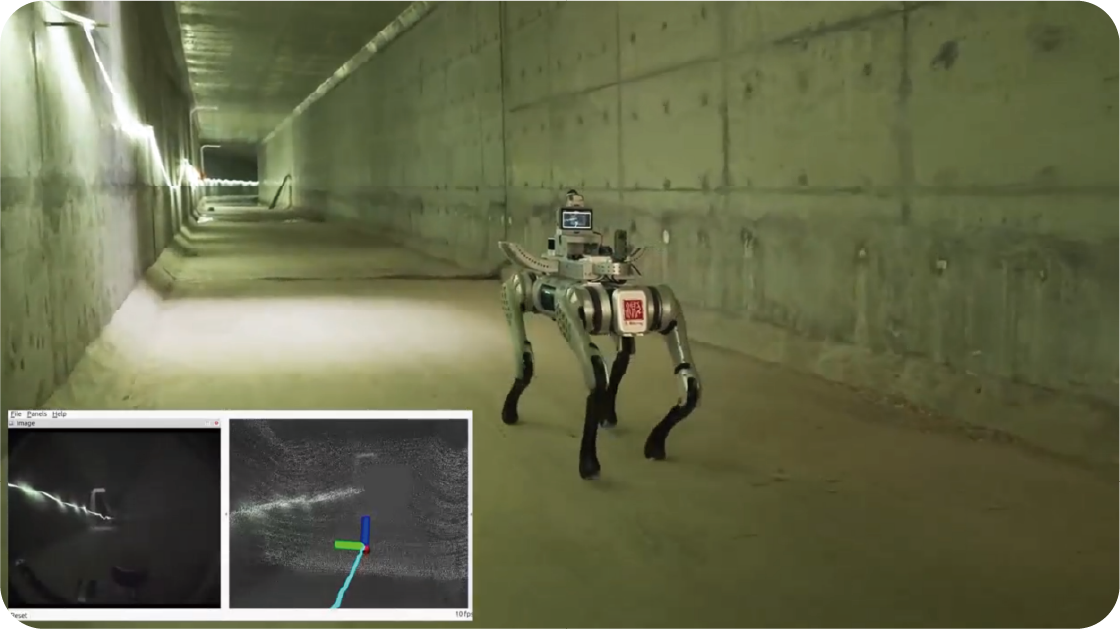
GeoScan搭载机械狗,实现“边走边扫”自动建模。40分钟完成传统方式10倍工作量,精度达厘米级,高效赋能基层施工、大面下单等场景。
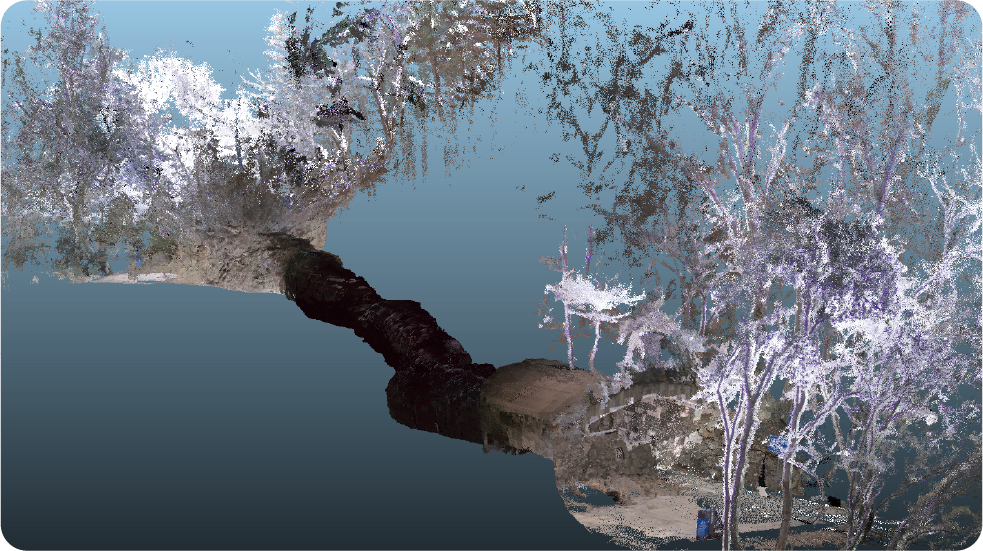
配合自研的 TGS 3D高斯渲染软件
原始点云数据可进一步生成高逼真度的实景三维场景
人才公园石碑
南头古城城墙
人像雕塑
四象喷水池
快速获取建筑室内外完整三维数据,生成高精度图纸,显著提升测绘效率与数据准确性。
在无GPS环境中动态采集点云,用于施工质量控制与运营期形变、缺陷检测。
定期扫描量化施工偏差,实现进度与成本的数据化精细管理。
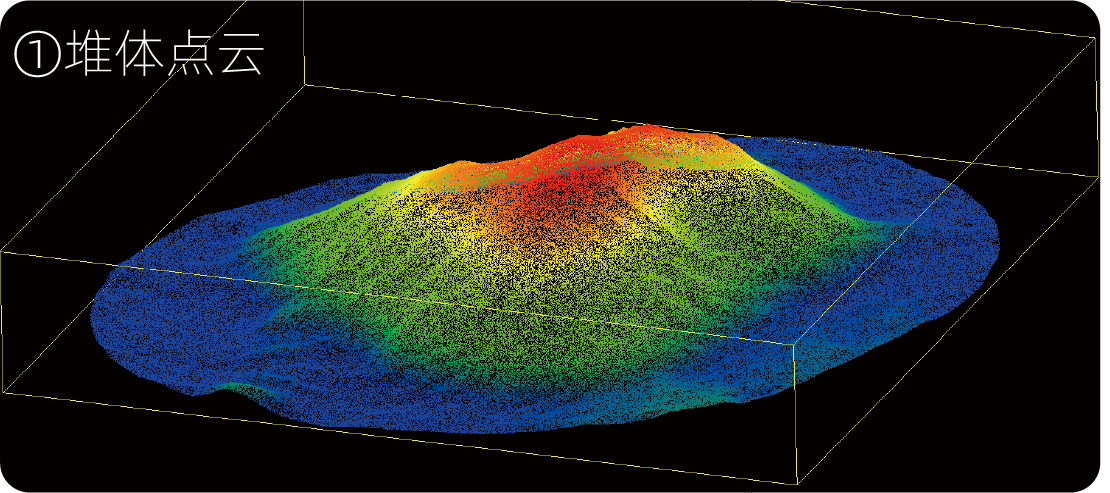
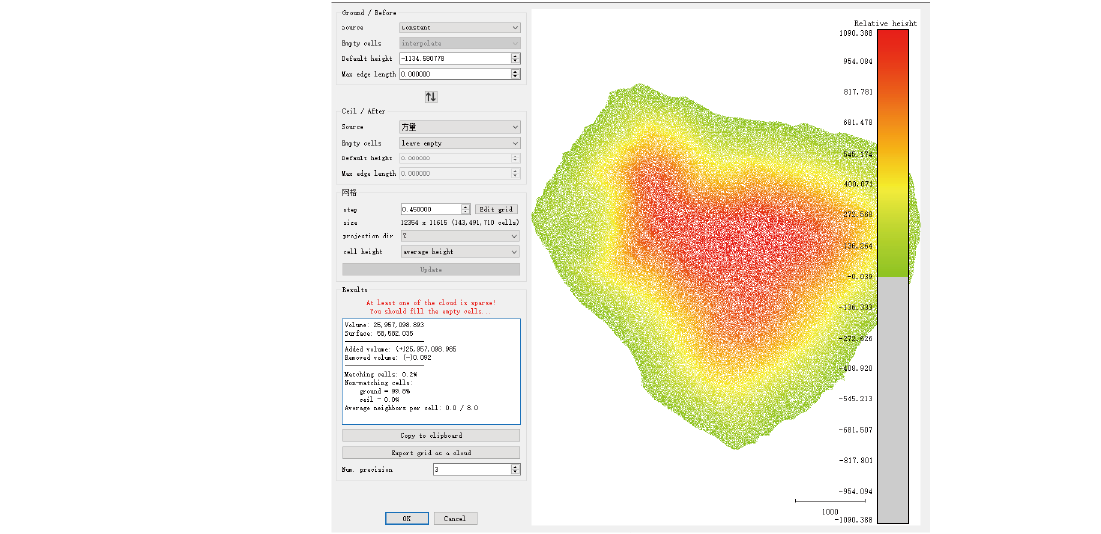
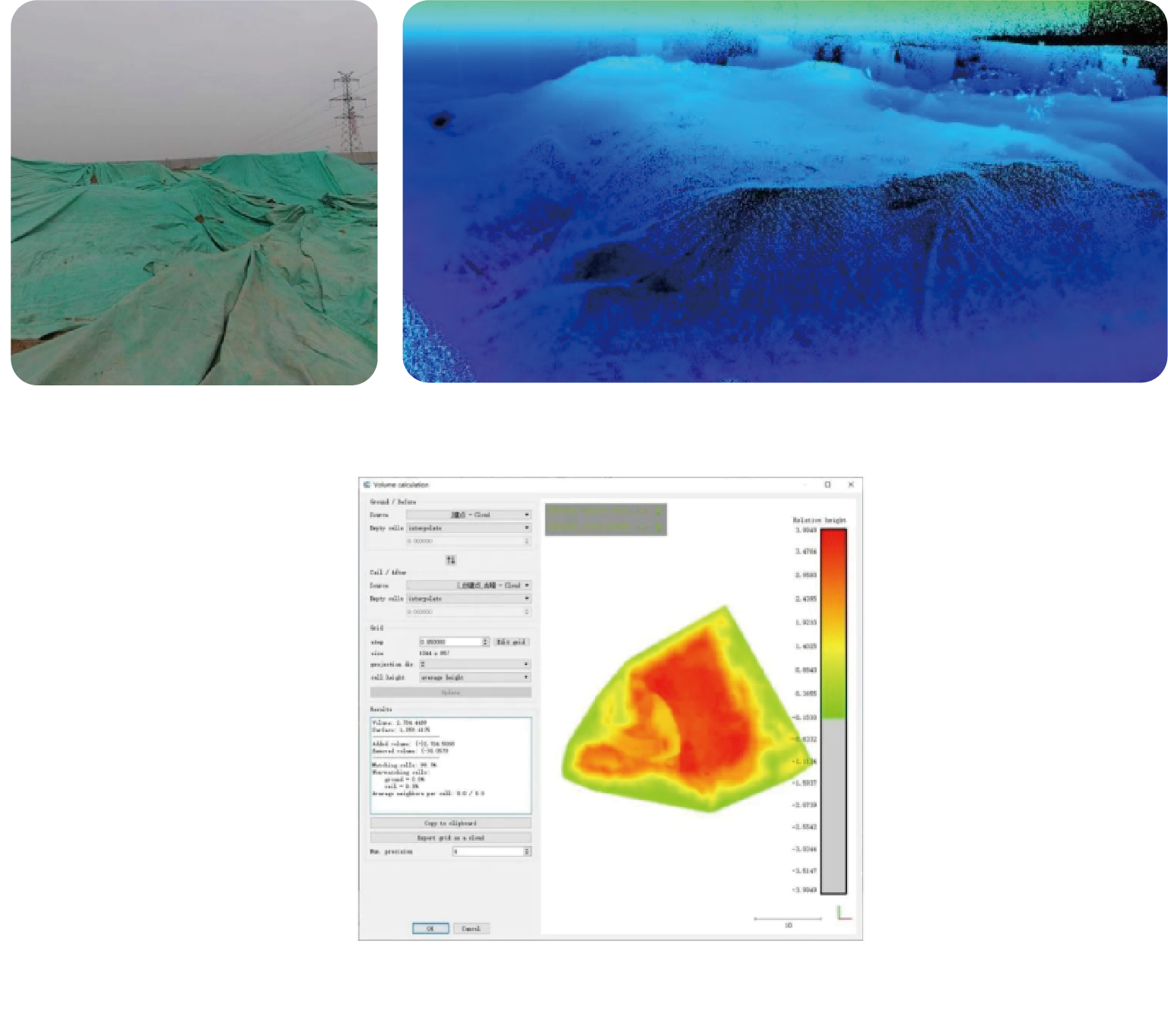
快速获取堆体表面三维数据,精确计算体积方量,为库存管理与贸易结算提供可靠依据。
灵活获取工厂环境三维实景,为预防性维护、改造升级提供可视化数据基础。
高效采集道路设施三维信息,自动识别路面病害并定位,实现高效、精准的数字化管养。
远程快速获取事故核心区三维实景,为安全救援决策提供关键的空间态势信息。支撑高效救援与规划。















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






{kind=link}
{kind=link}
{kind=link}
{kind=link}