ROS机器人
Gemini
仿工业AGV设计小型ROS机器人
Gemini-O
全向运动小型ROS机器人
Cutebot
四轮差速小型ROS机器人
Stone
两轮差速复合机器人
Giraffe
独立悬挂两轮差速复合机器人
开源无人机
Q300
模块化小型室内开源无人机
Q600
室外开源无人机
Shark680
开源仿生机器鱼
智能无人车
Turtle
智能差速AGV机器人
Thunder
独立悬挂差速四驱越野无人车
Thunder Mini
小型独立悬挂差速四驱无人车
Octopus
麦克纳姆全向无人车
Soldier
特种履带全地形机器人
GeoScan S1
便携高效,实时建图利器
GeoScan S2
开启空间的智能纪元
RS-URSD
无人机实时地图测绘系统
科研平台
RS-AGR
智慧农业采摘机器人平台
RS-INS
5G安防巡检机器人平台
RS-MUL
空地协同编队系统
核心零件
ROS-IMU
惯性测量单元
T-RTK UM982
高性价比模块化卫星定位模组
G-T200
力控二指夹爪
Mesh
百公里级无线自组网模块
QuickLink
即插即用,自适应自控制才是 “ 真智换 ”
RobotCore Mini
高集成轻量化机器人控制主机
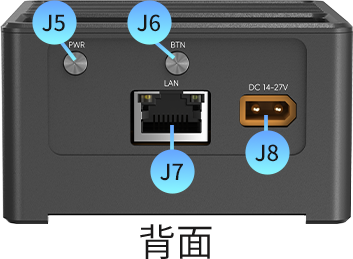
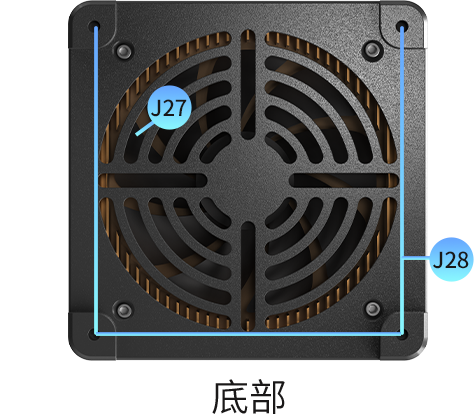
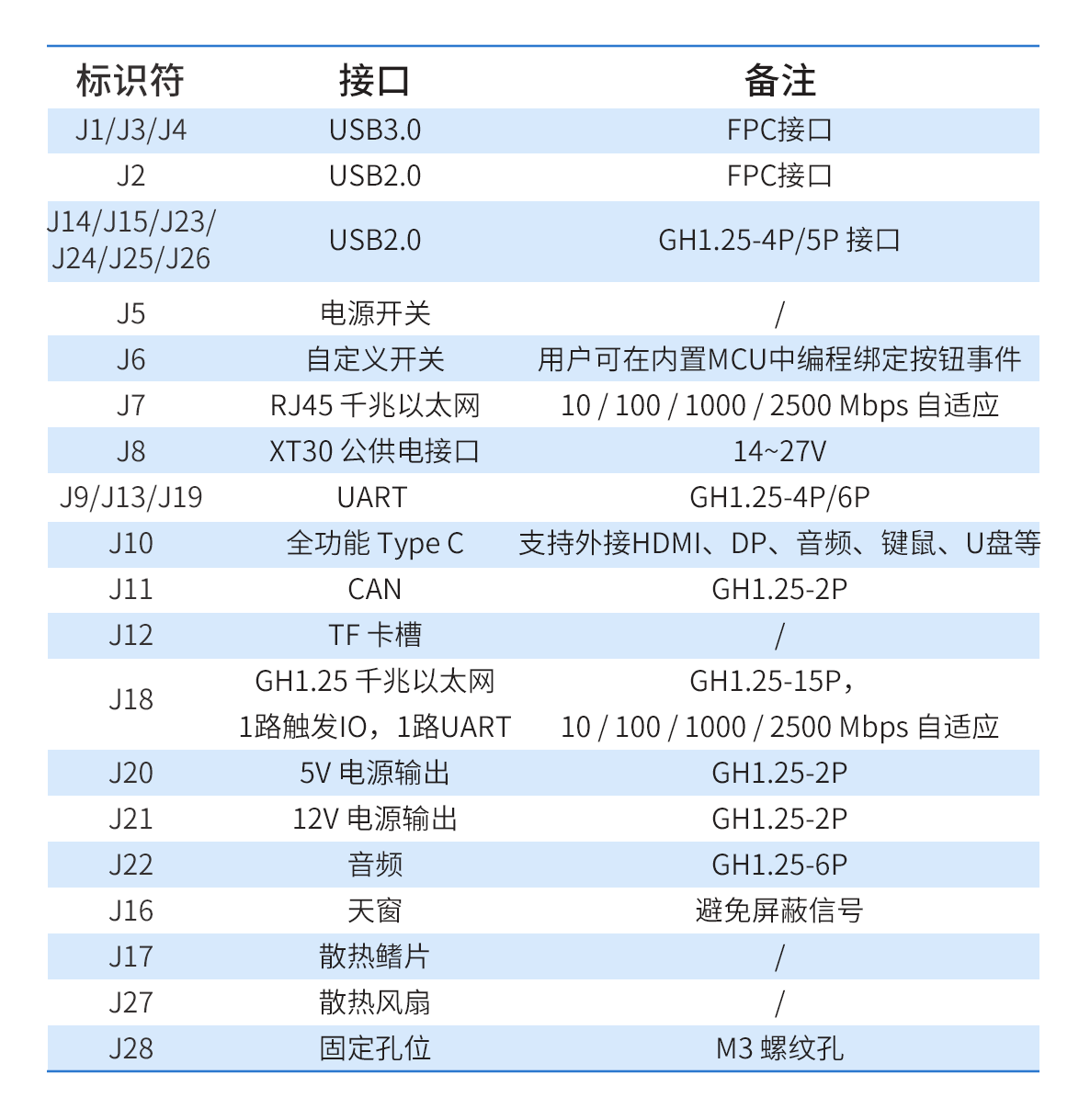
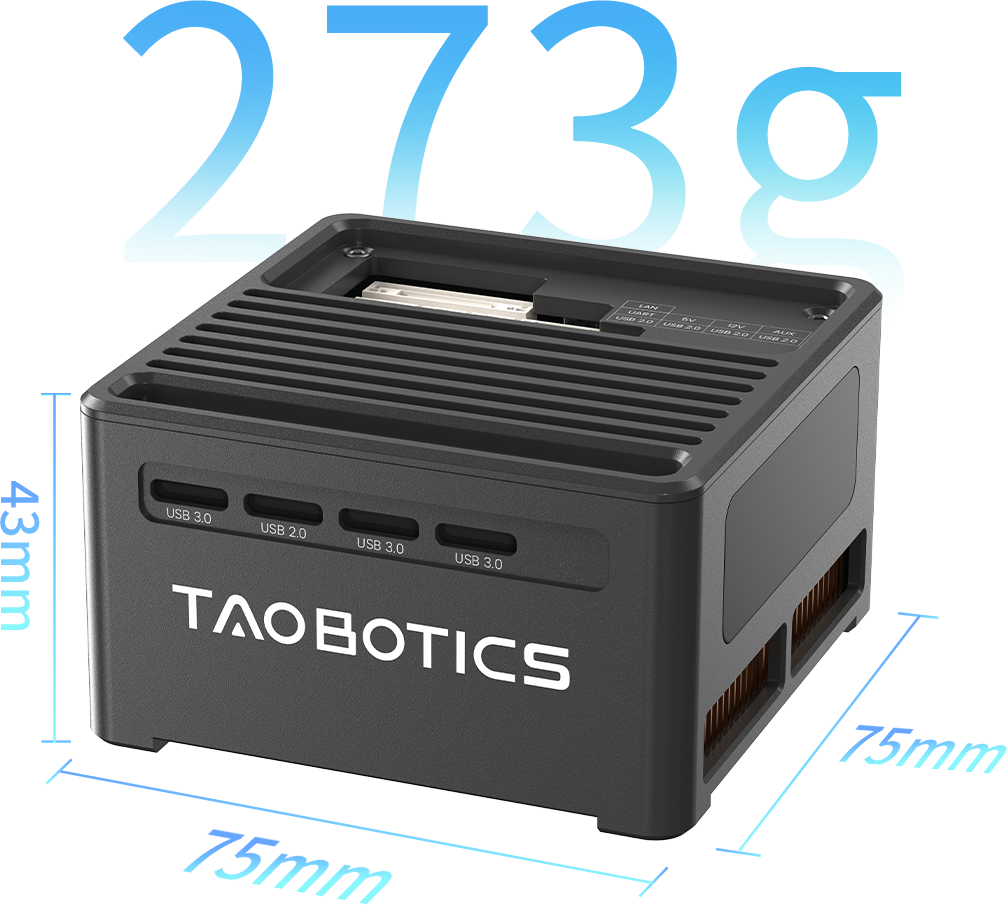
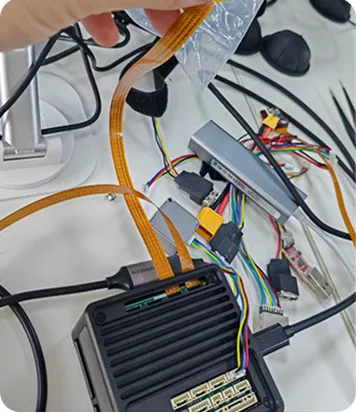
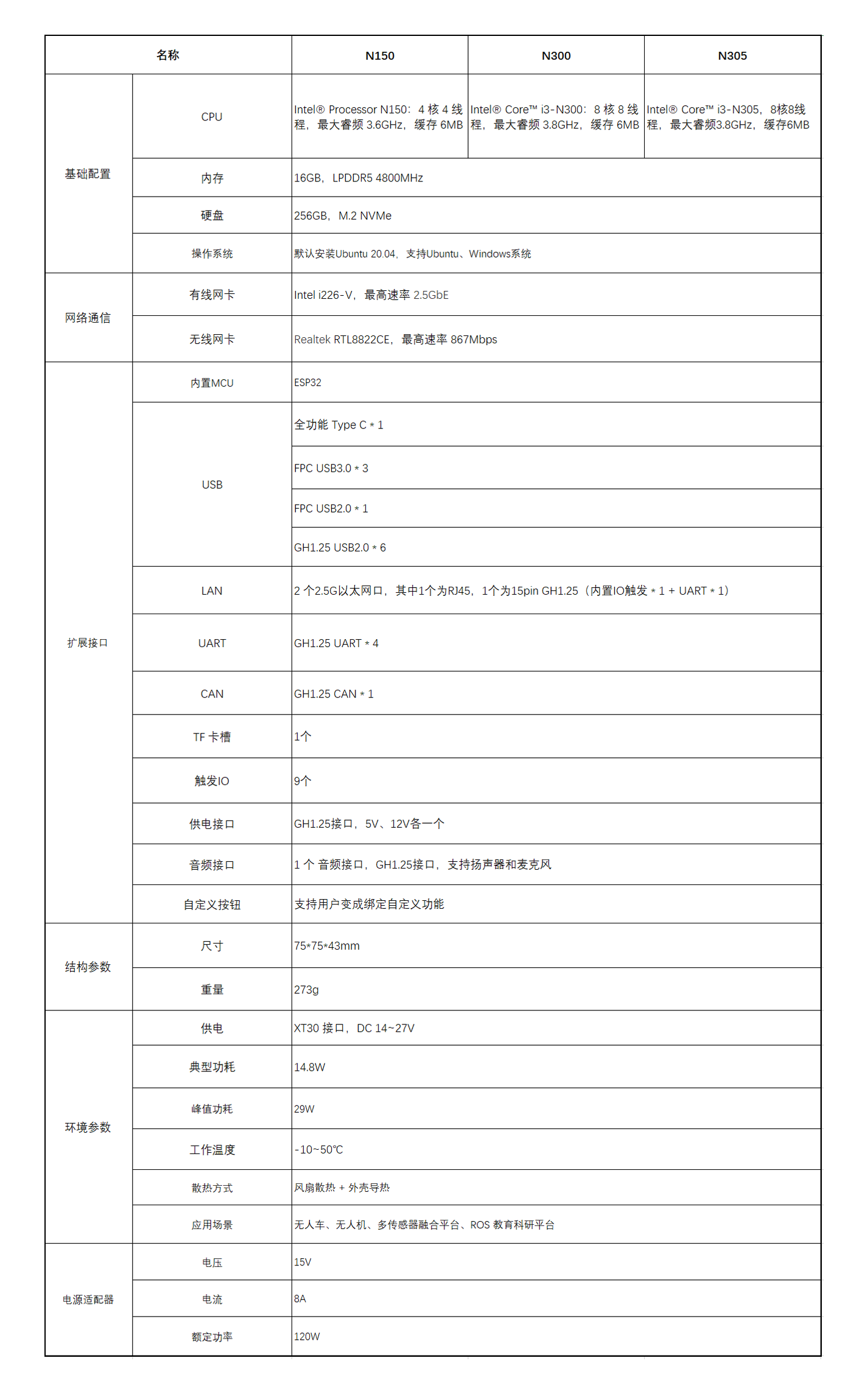
RobotCore Mini 是一款专为机器人与无人系统打造的轻量化 x86 Mini 主机,大量采用 GH1.25 防松接口,连接稳定不松动,有效降低线缆松脱风险。产品搭载英特尔 i3-N305 处理器,配备 16GB LPDDR5 内存与 256GB 存储,整机尺寸仅 74×74×43mm,重量约273g。内置MCU、集成双 2.5G 以太网、USB、UART、CAN、触发 IO 及外设供电接口、自定义功能按键,适用于无人车、无人机、巡检机器人及多传感器设备快速部署与可靠运行。
可作为无人车、巡逻车、配送车、科研底盘等移动机器人控制主机,连接雷达、相机、RTK、IMU、底盘控制器等设备,实现感知、定位、导航与控制。
适用于多旋翼无人机、复合翼无人机及机载任务载荷,满足飞行平台对小体积、轻重量、稳定连接和边缘计算的集成需求。
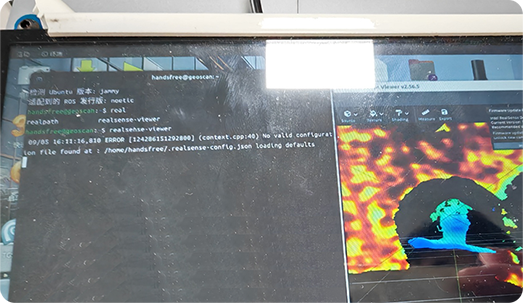
面向 SLAM、手持测绘设备、感知采集盒和标定平台,可接入雷达、相机、IMU、RTK、CAN 设备及触发信号,实现多源数据采集与同步。
适用于高校实验室、机器人课程、SLAM实验和无人系统开发,基于 x86架构,便于部署 Ubuntu、 ROS/ROS2,及主流机器人算法环境。
大量采用 GH1.25 防松接口,线束布局更紧凑,可有效减少接线空间,同时降低机器人运动、震动场景下线缆松脱和通信中断风险。
基于 x86 架构设计,兼容Windows、Ubuntu、ROS / ROS2 及主流机器人开发生态,降低算法部署与系统迁移成本。
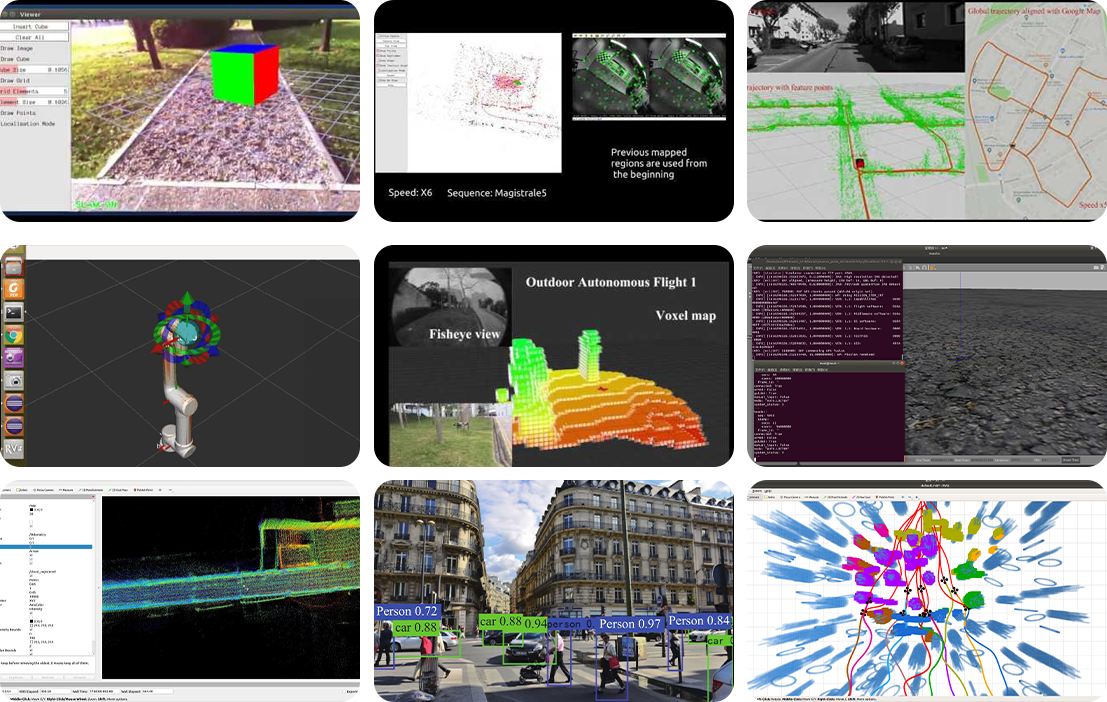
支持多种ROS开源项目
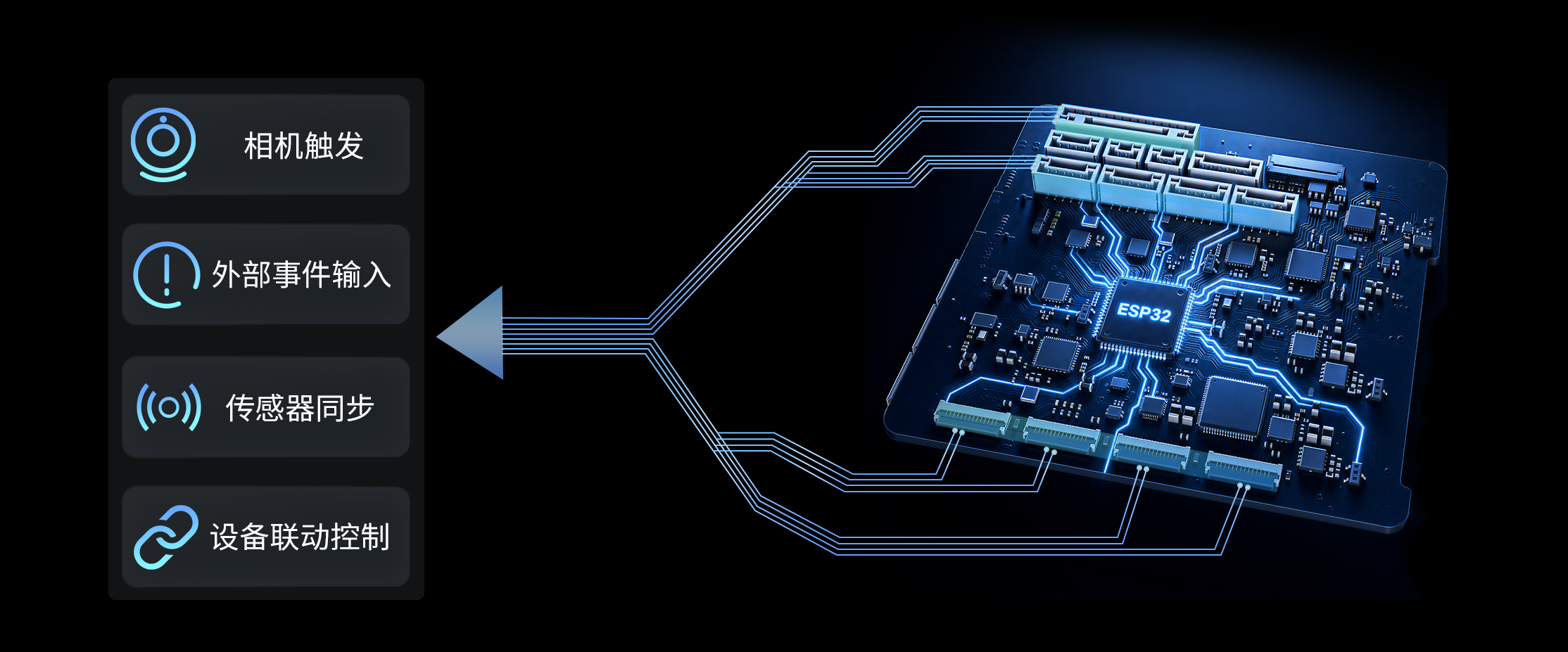
内置 ESP32 直连主机,支持二次开发。
提供 9 路触发 IO,可用于相机触发、传感器同步、外部事件输入及设备联动控制。
具备自定义功能按钮,用户可编程绑定按钮事件。
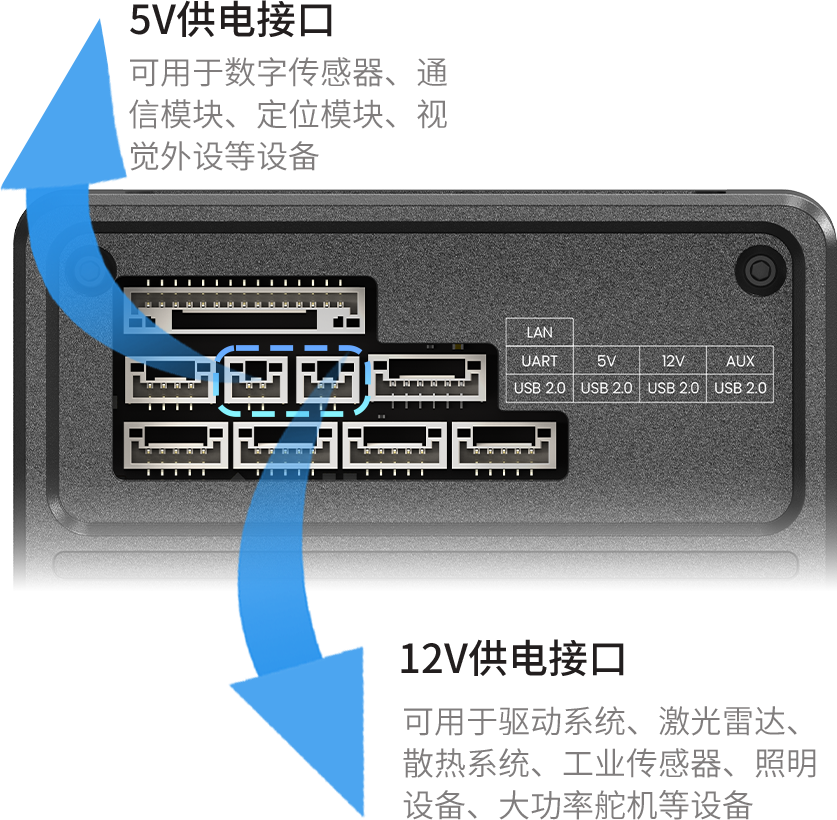
提供 5V / 12V 外设供电接口,USB 单口最大支持 5V/2A 输出,减少额外电源模块并降低线束复杂度。
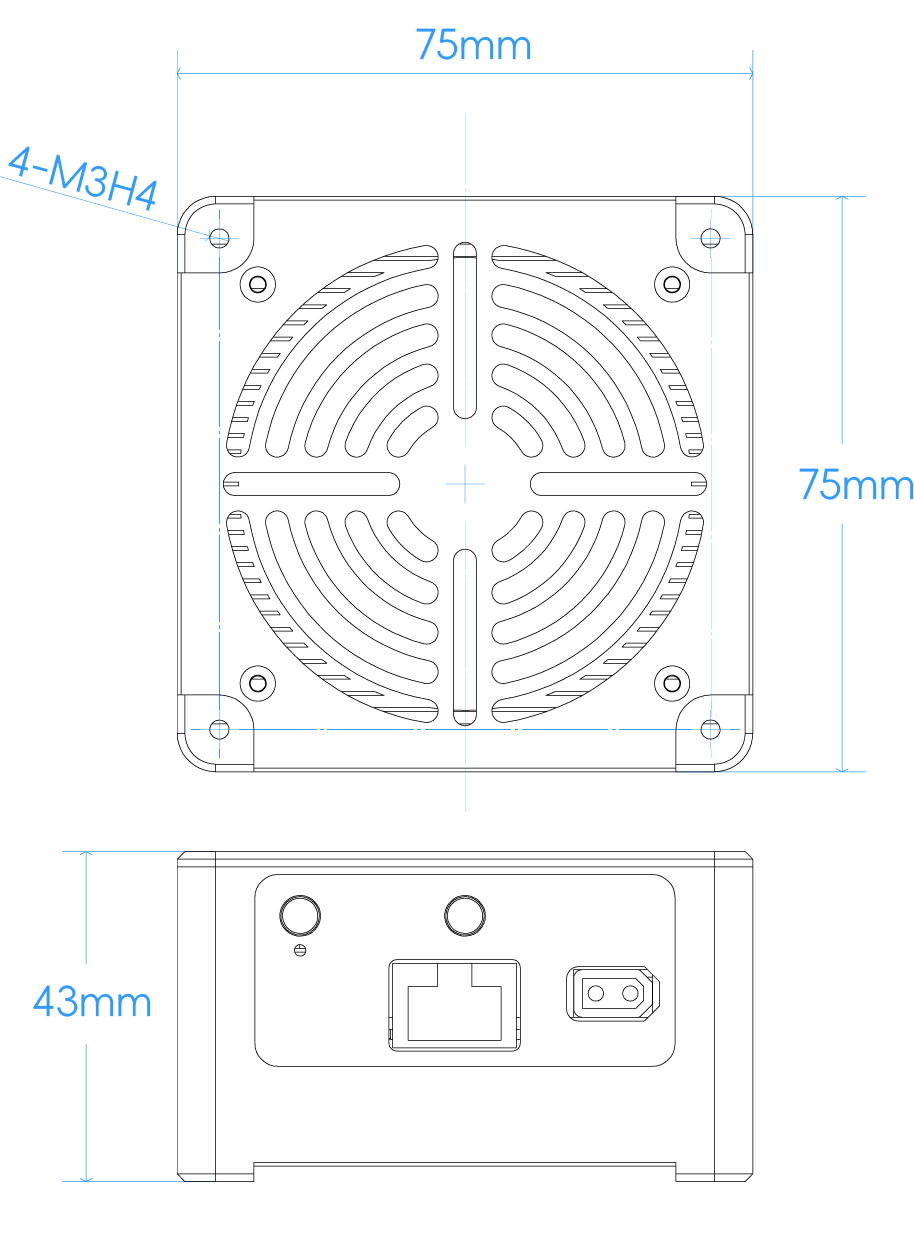
整机尺寸仅 75×75×43mm,重量约 273g,适合无人车、无人机、机器人等快速集成。
历经多次迭代与多轮极限测试验证,性能稳定、功能全面,可靠满足机器人平台多元场景需求。
{kind=link}
{kind=link}
{kind=link}










{kind=link}
{kind=link}



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




{kind=link}
{kind=link}




{kind=link}